機器視覺與移動機器人是華睿科技的兩大業務板塊。在機器人視覺領域,華睿團隊從2016年獨立自主開發工業相機,在7年中不斷迭代升級技術。當前,華睿科技從圖像采集、算法處理、圖像傳輸再到軟件控制,可提供全系列硬件視覺感知單元和視覺算法平臺,擁有幾百件的專利,保證了技術的自主性和領先性。 結合在機器視覺與移動機器人領域深厚的技術積累及豐富的行業應用經驗,華睿科技創新性地推出了各類視覺產品,助力倉儲物流效率進一步提升。
在物料出入庫過程中,面對種類繁多、大小不一的物料,傳統方式需要人工手動掃描,不僅效率低,人工耗費大,且有出錯的風險,可靠性低,尤其是在雙十一等出入庫高峰期間問題尤為突出。 華睿科技打造的AGV讀碼門可實現倉庫到貨檢驗、入庫、出庫等作業環節的數據自動化采集,保證企業及時準確地掌握庫存的真實數據,高效地跟蹤與管理庫存、訂單等信息,從而最大限度提升倉庫管理效率和效益。 AGV讀碼門由多個讀碼器組合構成,高性能的讀碼器是該方案的基礎,該方案中,采用華睿科技7000系列讀碼器,性能優異,集成度高。
出入庫讀碼門通過在貨物兩側安裝相機,當托盤整體通過讀碼門時,每臺相機實時讀碼,并進行目標跟蹤。當貨物離開時,匯總讀到的條碼,同時將每臺讀碼相機的跟蹤信息進行匯總,實現碼垛整體全景拼圖顯示。融合先進的深度學習面單/物體定位算法,實現條碼和貨物的綁定,當出現未讀碼的包裹時,提示異常,引導進行人工補錄。 
讀碼門工作流程
• 高效識別 替代工人挨個掃描的方式,一次完成整個堆垛識別,單次動態識別耗時≤10s,讀碼率可達99.9%,極大節省人力投入,確保識別準確性。 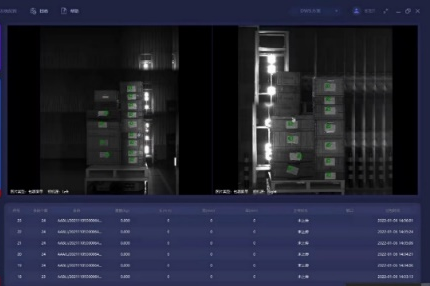
• 全景展示

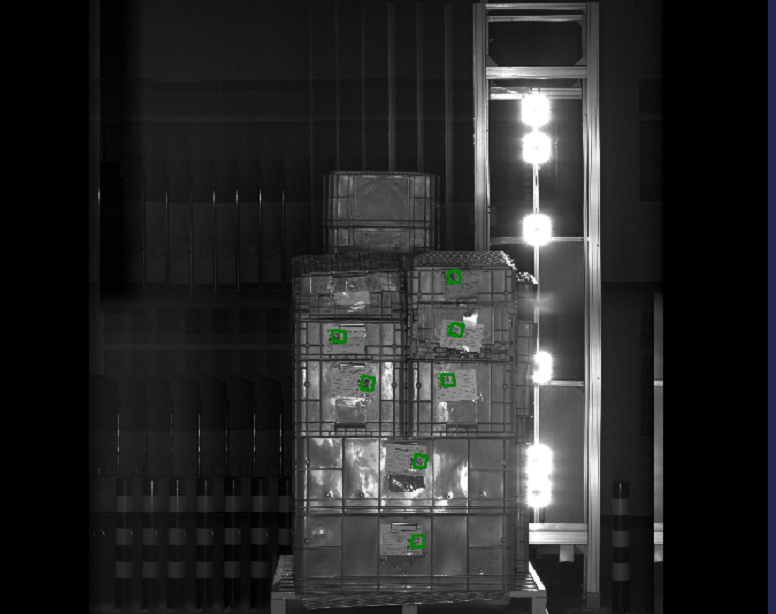
華睿科技通過追蹤讀碼相機畫面內貨物的移動,將所有相機采集的圖片進行標定、對比、融合,完整展示堆垛貨物讀碼情況。 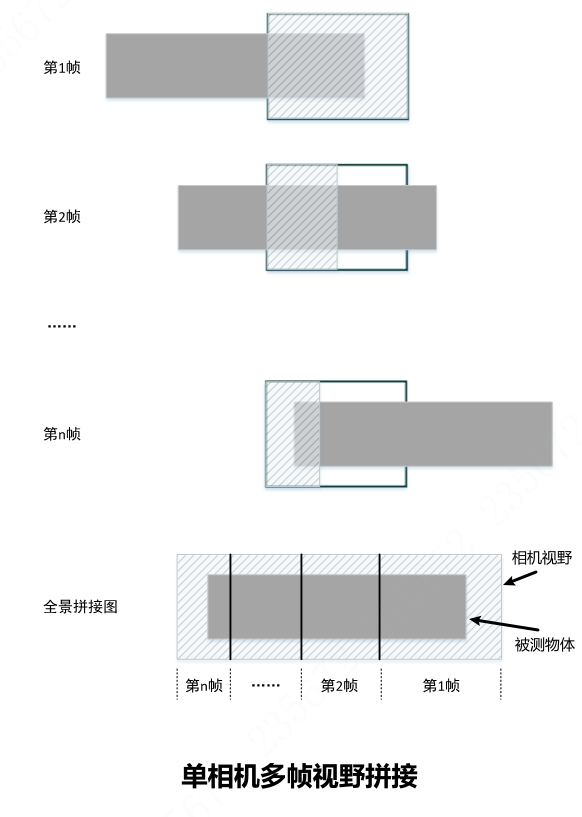
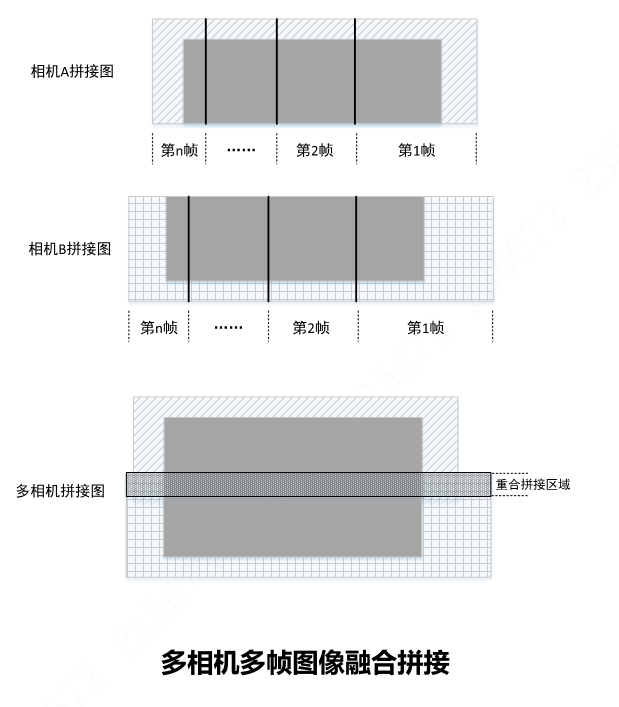
通過大景深相機融合先進拼圖算法, AGV在不同位置通過時,可精確計算不同相機之間的重合區域,進行準確的多相機拼接。 •人性化的人機交互 通過先進的深度學習面單檢測技術,實現讀碼/未讀碼條碼的綁定框選,針對未讀碼紅框標記,配合大屏清晰顯示,便于工人進行條碼補錄,防止貨物漏檢。
憑借優異的性能,華睿科技的AGV讀碼門自推出以來受到了更多終端客戶的青睞,當前,已經在汽車、3C等行業相繼落地,助力企業物料出入庫效率進一步提升。

截至目前,華睿科技自主研發的AGV讀碼器已與多款移動機器人平臺結合,在智能倉儲,智能物流分揀,生產線搬運等多個領域成熟應用。
1、智能倉儲 傳統倉儲行業實行非自動化的管理,搬運依賴人力,出入庫記錄依賴人工。隨著貨物規模的增大,導致勞動效率低下,人工成本極高。
移動機器人搭載華睿科技AGV讀碼器,管理者能精確獲取AGV的實時位置信息,通過機器人調度控制系統,同時調度上百臺機器人協同工作,大幅降低人工成本,提升工作效率。 2、智能分揀 分揀作業是物流倉儲中重要環節,隨著電子商務的爆發式增長,配送商品的種類和數量急劇增加。傳統物流分揀以人工分揀為主,已無法滿足現代化物流對速度和準確性的高要求。 移動機器人配合華睿科技AGV讀碼器,能慧眼識途,將貨物送達指定位置,擁有更低的分揀誤差率。在整個分揀過程中可基本實現無人化。 3、生產線物料搬運 制造業發展使得生產線流轉速度越來越快,傳統人工上下料及物料運輸已經跟不上生產節奏。搭載華睿科技AGV讀碼器的移動機器人,適用于產線各上下料點之間物料的智能運轉需求。既提高了工作效率,也減少了人工成本。
華睿科技·AGV讀碼門
方案背景
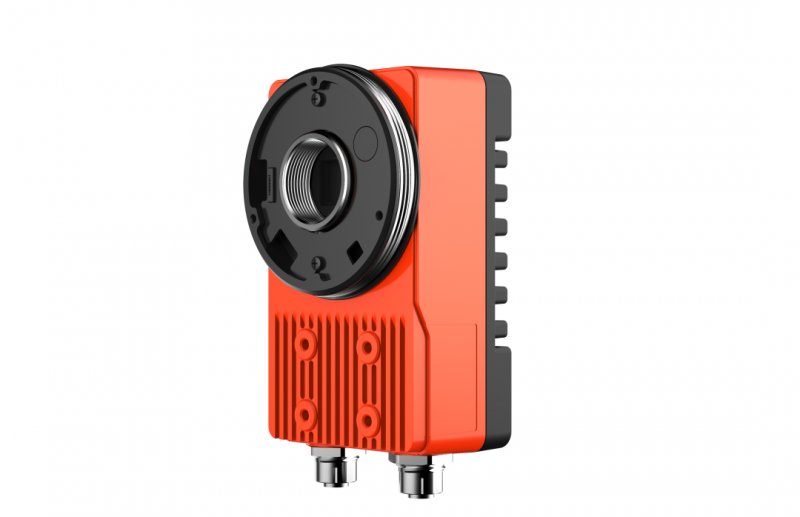
7000系列讀碼器
● CMOS系列化產品,高速采集、圖像優異
● 內置深度學習算法,高效強大的算法性能
● 支持軟件觸發/外部觸發/自由運行等多種觸發模式
● 千兆工業以太網接口,可提供1Gbps帶寬
● 豐富的IO接口,RS232、3路隔離輸入和3路隔離輸出
● 工業級M12連接器,IP67防護等級
方案介紹
方案優勢
在傳統堆垛讀碼過程中,讀碼軟件只能依次顯示每臺相機每幀畫面的讀碼情況,無法展示貨物完整圖片及讀碼情況。
傳統讀碼軟件顯示單幀畫面
讀碼門軟件顯示整個堆垛

應用案例
華睿科技·AGV讀碼器
在實際場景下,移動機器人的穩定性、準確性和高效性顯得尤為重要。針對這一行業痛點,華睿科技自主研發AGV讀碼器,能夠實時精準地獲取AGV的位置信息,反饋AGV調度控制系統,順利完成工作任務。
華睿科技·讀碼器
• 內嵌高性能讀碼算法
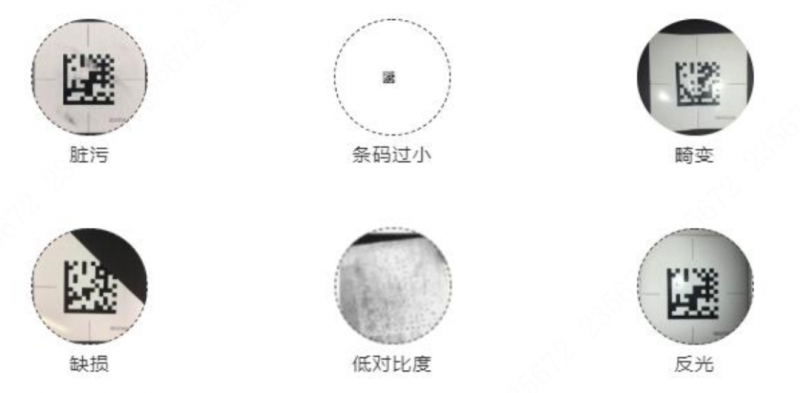
華睿科技AGV讀碼器內嵌自主研發的讀碼算法,最大讀碼個數可達125個/秒。可支持高效讀取DM-12&DM-14等二維碼,以及DM陣列碼。自研算法可有效應對實際場景下二維碼臟污、變形、反光、遮擋等多種情況,精準完成讀碼任務。
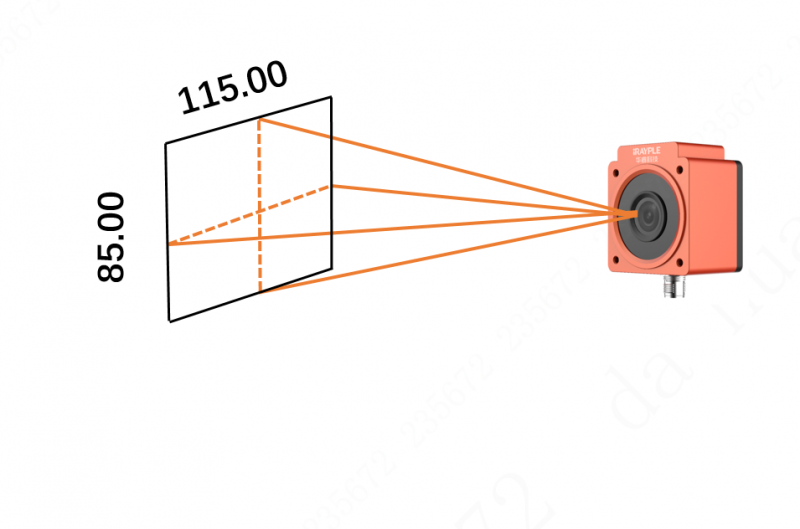
• 超大視野
華睿科技AGV讀碼器視野范圍115mm x 85mm,AGV運行不再受讀碼器視野局限。
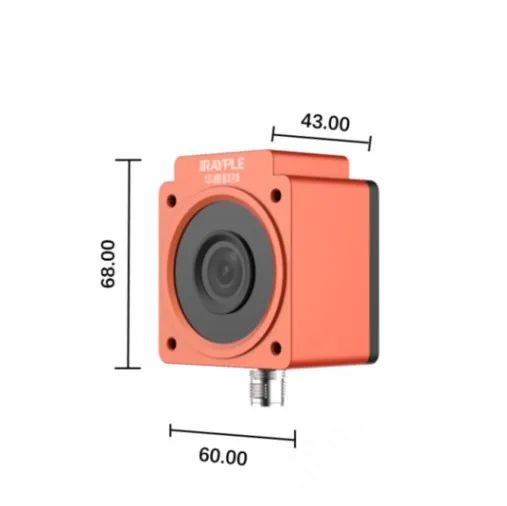
• 集成度高,體積小巧
華睿科技AGV讀碼器集成度高,結構精巧,“身材”迷你,能應對各種復雜的工業環境。
行業應用
移動機器人搭載華睿科技AGV讀碼器,管理者能精確獲取AGV的實時位置信息,通過機器人調度控制系統,同時調度上百臺機器人協同工作,大幅降低人工成本,提升工作效率。