常見的3D深度相機(jī),根據(jù)工作原理的不同,分為ToF、結(jié)構(gòu)光、雙目視覺幾類。它們的工作原理和特性如何,如何才能挑選到機(jī)器人最合適的傳感器,這篇文章讓你一探究竟。
3D深度相機(jī)工作原理
1. 雙目視覺相機(jī)工作原理
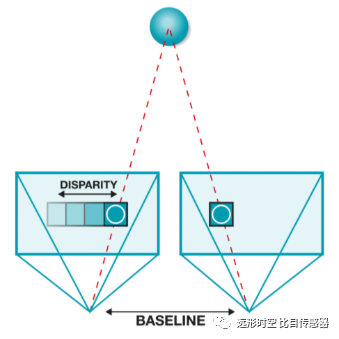
雙目視覺相機(jī)借鑒了人類雙眼的原理。它使用并排的,光軸平行的兩臺相機(jī)來觀測物體并感知被觀測到物體的深度信息。兩臺相機(jī)之間的距離是固定的,而兩臺相機(jī)光學(xué)中心之間的距離稱為基線距離。兩臺相機(jī)分別從不同的角度拍攝到被觀測物體。被觀測物體距離相機(jī)越近,其在兩臺相機(jī)上拍攝到的兩幅圖像中的相對位置變化就越明顯。這種相對的位置變化被稱為視差。根據(jù)兩臺相機(jī)拍攝產(chǎn)生的視差信息,就可以通過算法計(jì)算生成深度圖。對于被觀測物體的照明,則有被動和主動兩種方式。被動方式使用外界環(huán)境光線包括普通日常人造光源來進(jìn)行照明以便于成像。而主動方式則是在相機(jī)的拍攝視野范圍內(nèi)使用發(fā)光元件發(fā)射隨機(jī)的圖案打到待觀測物體表面,從而大大增加物體表面上便于用來識別和生成深度圖的紋理信息。一般地,多使用可生成偽隨機(jī)圖案的激光器,也可使用結(jié)構(gòu)光。雙目視覺方式的優(yōu)點(diǎn)包括對外界光線劇烈變化的魯棒性,以及多臺設(shè)備之間互相完全不會發(fā)生影響和干擾。雙目深度相機(jī)的成本根據(jù)檢測范圍、距離和要求的精度不同而變化。
1. 結(jié)構(gòu)光3D相機(jī)工作原理
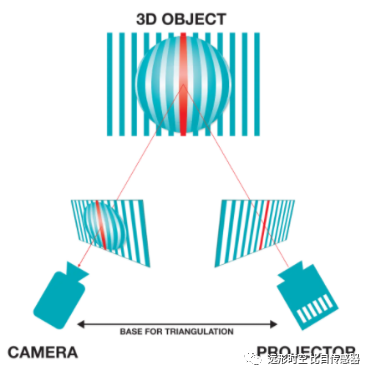
結(jié)構(gòu)光的工作方式是用投影機(jī)將特定的光學(xué)圖案投射到視野中待觀測物體的表面,然后使用相機(jī)進(jìn)行拍攝,從而獲知3D深度信息。常用的光學(xué)圖案有點(diǎn)狀圖案、條紋狀圖案、或者具有色彩編碼的光學(xué)圖案,有時(shí)也使用隨時(shí)間變化的圖案。相機(jī)和投影機(jī)被固定連接在一起,因此相機(jī)相對于投影機(jī)的位置和角度是固定不變的。因此,相機(jī)拍攝到的是投射出的光學(xué)圖案打到待觀測物體表面而形成的變形后的狀態(tài)。通過計(jì)算投射出的原始圖案和拍攝到的實(shí)際圖案之間的差異,即可重建相機(jī)視場中的3D深度信息,并輸出深度圖像。結(jié)構(gòu)光方式對于透明物體,高反光率的表面,以及大范圍視場的效果不夠理想。另外這種方式的劣勢還包括:當(dāng)多臺設(shè)備的探測視場在同一個區(qū)域內(nèi)出現(xiàn)重疊,或者外界環(huán)境光、其他光源和投影機(jī)打光的波長相同的時(shí)候,會造成明顯的干擾而導(dǎo)致性能惡化。結(jié)構(gòu)光方式的優(yōu)勢則是在較小的工作范圍下,可以通過相對有限的成本得到較高的精度。
1. ToF深度相機(jī)工作原理
ToF(Time of Flight)的工作方式是通過測量光經(jīng)過一個特定距離所用的時(shí)間來計(jì)算出距離。ToF相機(jī)上分別有光發(fā)射器和接收器,由于光速是已知且固定不變的,光從發(fā)射器到待觀測物體表面再到接收器的時(shí)間和此段距離成正比,即可通過測量出所經(jīng)歷時(shí)間而計(jì)算出距離。ToF所使用的光發(fā)射器大多是紅外光LED或者激光器。
和結(jié)構(gòu)光方式類似,當(dāng)多臺ToF相機(jī)的探測視場在同一個區(qū)域內(nèi)出現(xiàn)重疊,或者外界環(huán)境光、其他光源和ToF的光波波長相同的時(shí)候,會造成明顯的干擾而導(dǎo)致性能惡化。因此,當(dāng)使用多臺ToF相機(jī)時(shí),需要通過相機(jī)之間的同步控制來解決這個問題。總體來說,ToF工作方式的優(yōu)勢是較高的精度,不依賴外部光源,以及對于表面缺乏紋理的被測物體也能獲得深度信息。
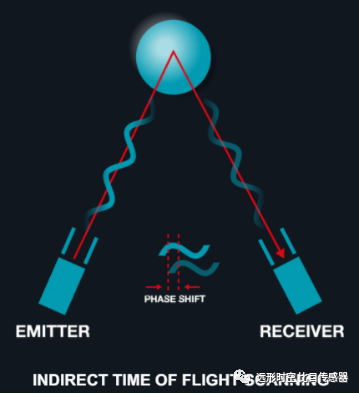
ToF又可分為dToF和iToF兩種:
dToF(Direct Time of Flight)是指發(fā)射器發(fā)出單個的光脈沖,通過測量從發(fā)出脈沖到接受到從被測物體表面反射回來的光脈沖信號所經(jīng)歷的時(shí)間來計(jì)算出距離。
iToF(Indirect Time of Flight)的光發(fā)射器發(fā)出連續(xù)的經(jīng)過調(diào)制的光信號,測距依據(jù)的是發(fā)出的光和接受到的反射光之間的相位差。

???
三種工作原理深度相機(jī)的對比:
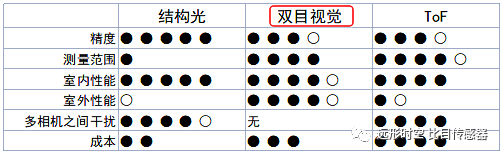
綜合到移動機(jī)器人在非結(jié)構(gòu)化場景中的應(yīng)用,對照上表的性能對比可以看到主動雙目深度相機(jī)無疑是最好的選擇。首先雙目原理兼顧了室內(nèi)室外場景,避免了多機(jī)的干擾,對于環(huán)境具有最高的適應(yīng)性;同時(shí)在測量范圍和測量精度上也具有非常好的性能兼顧;最后雙目系統(tǒng)可以非常好地平衡成本,做到價(jià)格可控。
遠(yuǎn)形時(shí)空科技推出的比目OS30A、OS20A深度相機(jī)模組是專為移動機(jī)器人避障設(shè)計(jì),采用了雙目+結(jié)構(gòu)光3D成像技術(shù),搭配專用深度計(jì)算芯片并針對機(jī)器人避障應(yīng)用場景進(jìn)行了專門優(yōu)化。
是目前市面上為數(shù)不多可以替代Intel RealSense D435的極具性價(jià)比的產(chǎn)品。
●超低功耗,僅有不到1.5W
●防水設(shè)計(jì),無懼惡劣環(huán)境
● 高達(dá)80度的水平FOV
●集成設(shè)計(jì)
● 耐高低溫
●防震
●支持多平臺

BIMU-OS30A/BIMU-OS20A已經(jīng)處于量產(chǎn)狀態(tài),并通過多項(xiàng)第三方可靠性測試和認(rèn)證。