EDP灰度除雙糾偏儀
為提高交叉帶用戶關注的訂單精準度,分揀機效率,避免錯分和包裹無謂循環。灰度除雙糾偏儀3D視覺產品MV-DB500S-C,專為快遞物流行業中交叉帶分揀場景打造,相機可同時獲取被測物的二維和三維信息,并內置自研的3D圖像處理算法及深度學習定位分割算法,對交叉帶上包裹數量和位置做出精準檢測判斷。
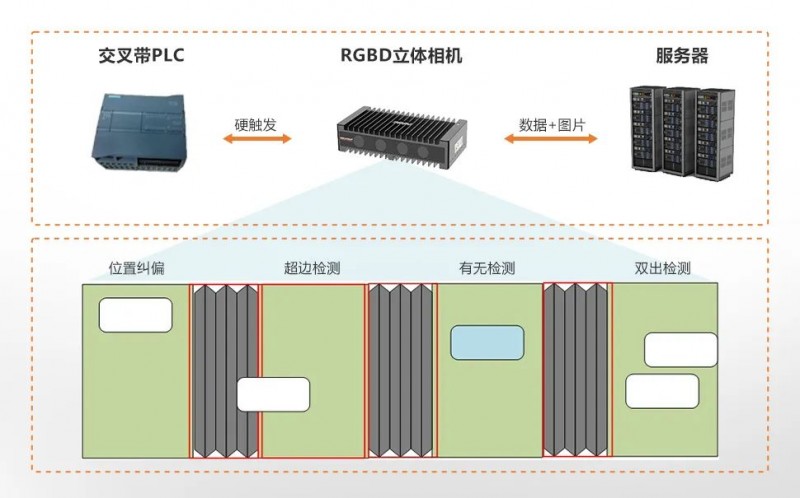
■ 兼容性強:適配交叉帶式、翻板式等多種形態的分揀機;超大視野,完美適配現場安裝要求
■ 簡單易用:出廠完成內參標定,現場一鍵系統標定,部署簡單
■ 定制拓展:提供功能定制服務,可定制分類、量方、雙車聯動等功能,提供SDK支持二次開發
單件分離器視覺系統
包裹散件扎堆,如何逐一分離?單件分離器視覺系統以MV-DB500S-S為核心,專為快遞物流行業中包裹分揀場景打造,依托自研的3D處理技術以及深度學習技術,對包裹進行實時精準定位,搭配自研的智能控制系統、控制模組帶完成包裹的分離,實現包裹單個通過且相互之間保持固定間隔。

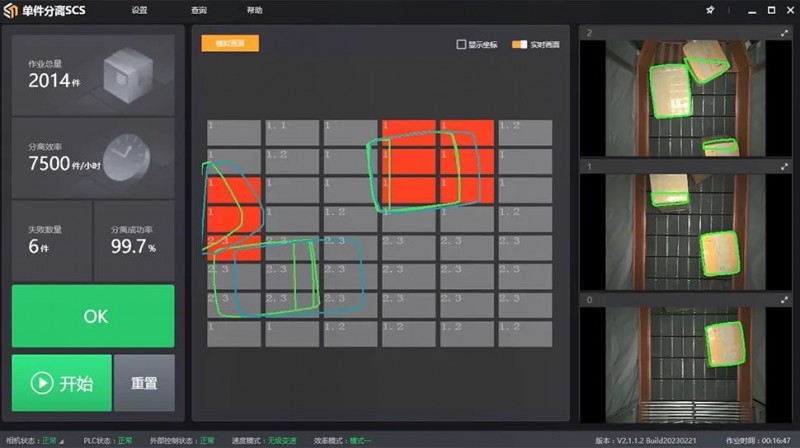
■ 穩定高效:自研智能控制系統,整合分離、拉包等功能,處理效率高、拉包間距均勻,場景適應力強
■ 強大算法:使用 2D 深度學習實例分割 +3D 定位算法實現精準包裹定位,高效識別多種類型包裹,無懼信封件、黑包裹、集包袋等特殊形態
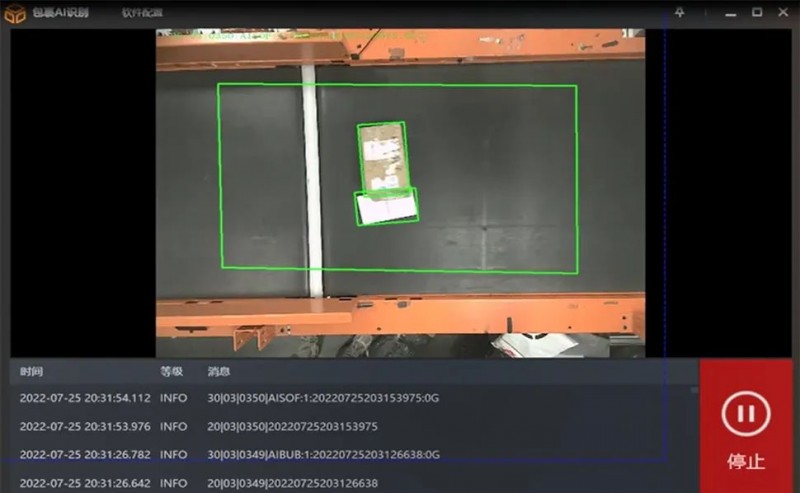
包裹分類系統
包裹在分揀、體積測量等環節中會受多種因素干擾,需借助包裹分類設備,結合包裹分類識別和疊件檢測等判斷結果,指導后段自動化設備或人工進行分揀、量方(計泡)等業務應用。包裹分類解決方案適用于快遞物流行業包裹分類場景,MV-DB500S-C采用深度學習方法根據包裹形態,紋理等特征,對包裹進行分類和疊件檢測,分類準確率>99.5%;疊件檢測準確率>99%。

體積測量系統
物流電商企業在包裹入庫、出庫時,需采集物體的體積信息。小件靜態量方產品MV-DB500S-V和大件靜態量方產品MV-DB1300A專為物流場景打造,多種測量方案可覆蓋全場景的體積測量需求,基于深度圖和RGB圖輸出更為精準的體積測量數據,同時擁有深度學習功能,支持包裹分類、薄件測量、以及更強的抗干擾能力。
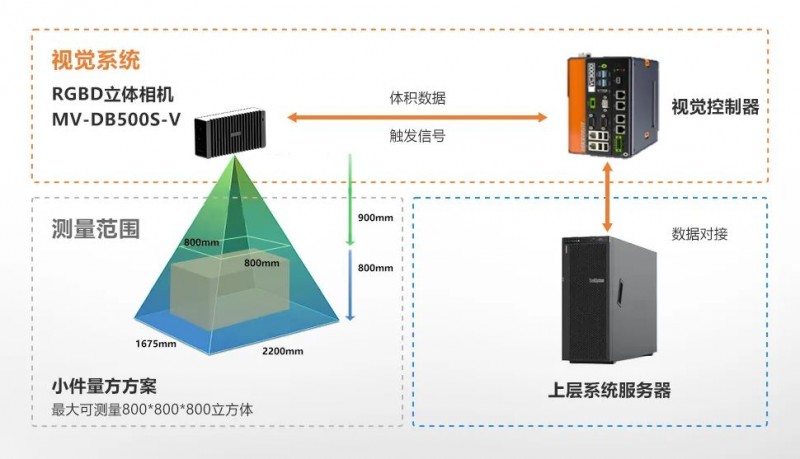
■ 高精度測量:規則物體測量精度±5mm;非規則物體測量精度±10mm
■ 超大測量范圍:多種測量方案適配常規快遞物流包裹以及大件國標棧板貨物測量
■ 簡單易用:支持系統一鍵標定、去手功能、提供多平臺 SDK,二次開發方便快捷
機器人供包系統
快遞物流分撥中心交叉帶設備通過供包臺人工供包,管理難度和勞動強度大,招工困難。機器人供包3D視覺產品MV-DB500S-R,針對快遞物流行業機器人供包解決方案應用,相機內置深度學習硬核,通過深度學習算法和傳統視覺算法的有機結合,搭配高精度路徑規劃算法,引導機器人全時高效抓取。


■ 深度學習智能算法:幾何輪廓特征識別+2D圖+3D點云的深度學習智能算法。智能算法優化包裹局部遮擋,包裹粘連造成的誤分割現象。
■ 超強包裹適應能力:無懼軟包、硬包及信封等各種復雜應用場景。考慮包括但不限于目標顏色、大小、材質、末端執行器信息的完備抓取優先級排序算法,確保機械手最大抓取成功率。
■ 高精度路徑規劃:自研路徑規劃算法,優選包裹抓取順序及運動軌跡,確保供件軌跡的流暢平滑、無碰撞、不甩包
■ 異形件智能識別:有效識別并剔除球體、柱體、超長超寬件等各類異形件,防止包裹錯分丟失
■ 實施操作便捷:僅通過按鈕盒可實現一鍵啟動、復位、停止等操作,實現操作運行“零”門檻
3D視覺引導拆碼垛系統
適用于倉儲物流場景的3D視覺引導拆碼垛系統由MV-DB1300A和機器人視覺引導平臺兩大核心組成,3D相機獲取貨物深度信息及高清2D彩色圖像,通過平臺軟件內置3D視覺算法和智能軌跡規劃算法,完成貨物定位及分割,并控制機械臂相應的抓取或碼放動作。

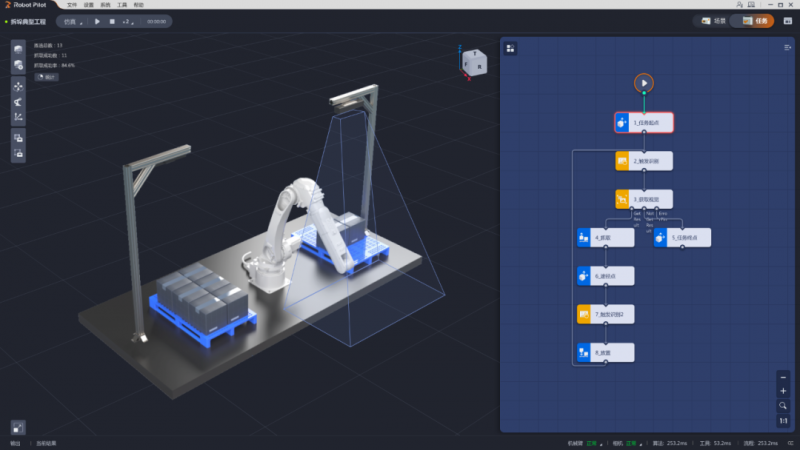
■ 柔性對接:支持AMR、傳輸線、讀碼系統、貼標機等物流設備無縫對接