技術進步推動應用加速
無人叉車融合了叉車技術和AGV技術,與普通AGV相比,除了能完成點對點的物料搬運之外,更能實現多個生產環節對接的物流運輸任務,不僅擅長高位倉庫、庫外收貨區、產線轉運三大場景,而且在重載、特殊搬運等場景也有著不可替代的作用。通過無人叉車的應用,可以解決工業生產和倉儲物流作業過程中物流量大、人工搬運勞動強度高等問題。



在20世紀50年代,最早的自動導引車輛(AGV)開始出現。這些AGV是基于提前設定的路徑,在工廠和倉庫中進行物料搬運任務。它們通常配備磁性導航或電纜導引系統,能夠準確地遵循預定的路徑。早期的無人叉車也沿用這一技術路線,在傳統叉車的基礎上做簡單的自動化改造。
從自動化到智能化
20世紀90年代,瑞典科爾摩根NDC開發了第一臺激光導航AGV,通過在AGV行駛路徑上安裝激光反射板,AGV通過發射激光束,同時采集由反射板反射的激光束,來確定其當前的位置和方向,并通過連續的三角幾何運算來實現AGV的導航。此后很長一段時間,無人叉車基本沿用這一技術路線,靈活性得到大幅提升。
激光反射板導航技術在移動機器人領域應用不斷深入之際,自然導航技術開始引起業內關注。2012年之后,AGV開始沿著更加自主化的方向發展,在AGV的基礎上,業內也開始提出新的概念——AMR(Automated Mobile Robot即“自主移動機器人”)。從“自動導引”到“自主移動”,自然導航類產品要實現的目標是,不需要任何標識,通過傳感器實時掃描環境并生成精確的地圖,使車輛能夠實現真正的“自主”,擁有更智能化的導航及避障能力。
2016年左右,國內企業開始探索自然導航技術在無人叉車上的應用,后續相繼有一些企業推出了相關產品,但前期并不穩定,市場的接受度也不高。近幾年,伴隨AGV/AMR廠商們在自然導航技術方面的持續突破,基于SLAM技術的自然導航叉車技術進一步成熟,落地應用速度也開始加快。
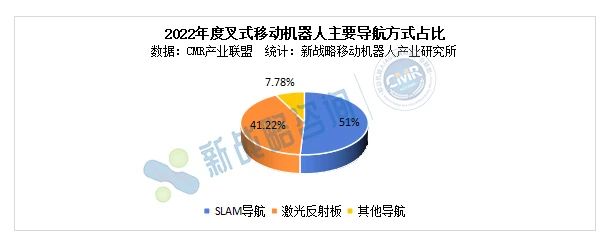
根據CMR產業聯盟數據,新戰略移動機器人產業研究所統計,2022年,SLAM導航(激光+視覺)的無人叉車占比首次超過了激光有反射板叉車,成為市場應用主流,占比為51%,激光反射板無人叉車增速不如SLAM導航產品,占比下降,為41.22%。
從第一臺無人叉車誕生至今,隨著各項技術的不斷發展,無人叉車的功能跟性能都在不斷提升,但無人叉車廠商們并未停下腳步,在產品的智能化以及形態結構等方面不斷探索,以期能夠打造出更成熟易用的產品,進一步取代人工叉車。
當前,無人叉車廠商的在技術方面的探索主要有以下幾個方面:
更柔性化的導航方式
導航技術一直是無人叉車突破的重點。未來,全生命周期SLAM、動態目標濾除、多傳感器融合、語義分割與識別等是無人叉車進一步提升導航能力的主要路徑。尤其是在無人叉車逐漸走向室外的過程中,3D導航技術的應用將會不斷增多。
3D傳感器的應用有利于機器人自動建立更為詳細的環境模型,系統部署也更為簡單,即使在環境特征稀缺的情況下,也能提供更為豐富的環境信息,有利于穩定的導航,在高動態環境下的魯棒性比2D激光導航更高,同時對地面平整度的要求有所降低,從而實現更高效、安全的搬運任務。
3D導航在移動機器人領域的應用從無人叉車開始,當前,已經有一些企業相繼推出3D SLAM無人叉車,并已經成功落地應用。
鐳神智能-3D SLAM輕量搬運式無人叉車LXST15-D
鐳神智能3D SLAM輕量搬運式無人叉車LXST15-D在車身頂部、中部、底部和叉尖裝有鐳神智能自主研發的激光雷達,在無人搬運過程中實現全方位的立體感知,360°的安全防護。適用于輕量化搬運場景,實現簡捷式點到點循環的搬運,開箱即用。
3D立體防護:全方位環繞立體感知,無人叉車運行安全有保障; 全方位環境感知:配置多個性能優越的3D多線激光雷達,為無人叉車提供穩定、豐富的3D環境信息,實現全方位超強感知能力; 部署便捷效率倍增:無需在環境中部署輔助設施,投入使用周期短;同時支持7*24h無人化作業,支持智能多機調度,大幅提高工作效率。 環境適應性強:適用于各種室內外跨場景,晝夜均可精準識別棧板與導航避障,實現全天時、全場景無故障運行; 綜合成本控制強:具備高穩定性、高可靠性、高可維護性及高安全性,綜合成本優勢全球領先; 靈活的環流模式:公交與的士環流模式隨意切換,操作簡單靈活,滿足點-庫之間的全部平面搬運需求;公交環流模式:站點停靠,接貨送貨,循環配送;的士環流模式:按需攔停,接貨送貨,循環配送; 配套管理軟件:標準的API接口可兼容多種系統軟件,同時也支持配套WMS、WCS、FMS、智能庫位監測系統,輔助管理無人化作業;
未來機器人-托盤搬運無人叉車VNST20
一顆3D激光集成定位、感知、立體防護功能。利用3D LiDAR獲取點云數據,智能計算識別點云特征,確認叉車當前的位置以及載具的位置。叉取貨物精度達到±10mm ±1°,在±100mm ±10°范圍內可以自動糾偏; 窄體式車身設計能縮小貨物擺放間距,增加存儲密度,最小堆垛寬度僅為2200mm; 實時智能區分障礙物與貨物、托盤,全程開啟前后向自主智能限速 避障,實時計算障礙物距離, 智能減速,智能停車; 兼容性強:田字托盤、川字托盤都能叉取; 效率高:取放貨速度快,智能不停車感知 識別取放貨,類似人的眼睛邊看邊調整對準; 項目導入簡捷,周期短。
藍芯科技-3D視覺智能平衡重無人叉車
高精對接:基于邁爾微視MRDVS的高精度相機M4 Pro和AI算法,智能定位料籠托盤孔位,調整進叉方向; 安全可靠:3D視覺避障+多級安全措施,實現 360°全向區域立體防護; 自主搬運:基于環境自然特征建圖和定位,無需軌道和地標,可自主定位、規劃路徑行駛; 適應性強:基于頂部無標記視覺自然導航,可在多動態場景應用。
中強光智能自主研發的3D激光SLAM無人叉車KSRB1425由智能3D激光導航出發,結合視覺及多項感知融合技術,搭配先進的演算能力,實現智能化精準運動,具體優勢如下:
精準定位:智能叉車可以實現±10 mm的定位誤差,可精準定位已規劃儲位; 超窄的車身設計,機動靈活,可以實現窄巷道的堆垛,最高可提升2.5米; 智能避障:智能叉車系統可以實現人機共享區域,遇障礙物會自動避障停車,障礙物解除后車輛自動繼續任務; 儲位占據識別:目標儲位被障礙物占據時,車輛會自動識別,停車報警,待障礙物被移除后,車輛繼續執行任務; 密集地堆:可以實現貨品的密集地堆存儲,車輛在貨品的密集地堆中可自由進出; 智能搬運:搬運出庫地堆最里面的貨品時,通過系統智能調配,挪移前面的貨品到其他空儲位,然后把需要的貨品搬運至指定位置。
更多新形態的探索
早期無人叉車的研發基本以改裝為主,即在傳統叉車的基礎上,搭載導航控制等軟件系統完成自動化改造。而伴隨著后期市場的擴大及應用環境的復雜化,AGV企業對車輛本體提出更多要求,定制化車體逐漸成為主流趨勢。無論是改裝還是定制,這一時期無人叉車本體基本沿用傳統叉車形態。 近兩年,一些企業開始摒棄傳統叉車的設計思路,開發新形態的無人叉車,新近崛起的新銳企業以捷象靈越為代表,他們基于叉車形態改造的新概念,在產品設計上打破原有基礎外形結構,開辟以顛覆形態為主的無人叉車新階段。 捷象靈越-前移式托盤機器人 捷象靈越推出的前移式托盤機器人是一款極小型無人叉車AMR,適配以托盤為主的工業場景,能夠覆蓋生產環節中難以觸達的碎片化搬運需求。諸如工廠布局難改造、空間狹小、生產和運輸設備難協同等痛點場景,真正解決了工廠物流“最后一米”難題。
輪式叉齒,前移叉取方式:叉齒自帶輪系和分離升降機構,前移叉取方式,無縫銜接原有各類叉取場景, 空滿載重心重合,安全穩定:貨物與車體重心始終重合,運行的安全穩定性遠高于傳統叉車。 車身輕量化、模塊化:前移式托盤機器人僅為1.1個標準托盤大小,具備極強的窄通道通行和限制場景搬運能力。個性化需求快速選配,車體易拆卸、快速排障提高了維保效率與用戶體驗。 360°感知全覆蓋,無視野盲區:車體部署雙雷達,空/滿載情況下感知都能保持360°全景感知。 -
快速換電續航:支持快速換電池、自動充電,滿足客戶不同充電需求。
輕量化、小型化、模塊化
形態上的創新外,輕量化與小型化的叉車也是當前各家企業開發的熱點,這類產品特點是小巧靈活,操作簡單快捷,交付方便,性價比高,適用于廠內的托盤物料搬運。同時,一些廠商通過模塊化的設計,提升產品的標準化程度,進一步縮短交付時間。 海豚之星—“人機協同”版機器人APe15小搬
窄通道、轉彎半徑小:“小搬”車體設計小巧簡約,所需通道寬度僅1950mm,最小轉彎半徑1290mm,能夠在狹窄的工廠環境中自由運行,很大程度上節約運輸空間。 巧:棧板識別、精巧定位,“小搬”在SLAM激光的基礎上支持二維碼、3D視覺相機,多傳感器融合感知模式,定位精度更高,能夠實現識別偏位±10°的棧板。 隨:人機跟隨、便捷高效。 快:跑得快、運行效率高,速度能達到2m/s,提高產線運輸效率。 易:無需網絡、上手快,操作部署簡單方便,無需環境改造,全程設置提示信息,7個步驟完全搞定。 協:手動+自動一體、自由切換,根據任務需求,靈活切換車輛運行狀態。這是人機共融的基礎實現。 融:APP交互、方便快捷,為“小搬”量身設計的APP軟件RCT-1000,搭配平板使用,更加方便快捷,無需切換各個軟件/控制器。
海康機器人的兩款新品,叉取機器人F5-1600A及F4-2000均采用模塊化裝配式設計,零部件之間耦合度大大降低,支持叉齒、叉腿、提升高度和負載定制,同時設計和供貨周期均有較大的優化。通過定制多種屬具配合,實現夾抱、旋轉、移載等多種物料移動動作,滿足復雜工藝要求。
全新叉取機器人F5-1600A是一款具備前移功能無人叉取式堆高機器人。兼容3D激光和2D激光SLAM導航,回轉半徑小,定位精度高;柔性運動控制,最大運行速度可達 1.5m/s,采用前移門架設計,減少運載空間,最大前移距 600mm,最大提升高度4.5m,額定負載1600kg。
同時推出的大載重堆垛型叉取機器人F4-2000,額定負載2000kg,滿負載提升高度可達2.5m,額定速度1.5m/s,直角堆垛通道僅需2.32m。
海康機器人叉取AMR可根據環境靈活部署,為汽車、鋰電、光伏、3C、醫藥、電商零售等行業企業打造智能化、柔性化的智慧內物流解決方案。同時,海康機器人的多款車型AMR,如叉取和潛伏等,都能夠在RCS智能調度系統下實現協同作業和批量化操作。這種協同作業和高效管理的方式具有很強的規模化優勢,能夠實現企業的生產流程更加高效、可靠和靈活。
國自機器人-窄巷道地面搬運輕型叉式AGV
國自機器人推出的Atom是一款適用于窄巷道地面搬運的輕型叉式AGV,打破了傳統叉式機器人的驅動結構,兼具叉式AGV搬運載具適應性強與潛伏頂升式AGV搬運通道要求低的特點。創新使用可調式叉齒結構設計,讓AGV裝配積木化,交付周期短,并可根據客戶需要,靈活調整叉齒外寬,采用SLAM導航技術,為客戶打造更加靈活、準確的智能物流搬運方案。產品廣泛適用于3C、半導體、倉儲等多個行業,助力各行各業數字化生產及倉儲。
基于電動托盤搬運車人工決策的靈活性以及智能搬運機器人自動配送的高效性,中力創新推出自動搬運車RPG201,人工決策,自動搬運,解決點對點長距離無效搬運!
-
手自一體設計,操作方便:可一鍵切換成自動搬運車或者人工駕駛的電動搬運車,滿足不同作業需求。
-
導航超穩定,不受環境變化干擾:以天花板作為視覺導航參照物,導航穩定,不受周邊環境變化影響,作業更可靠。
-
一鍵啟動,可離線運行:可使用藍牙啟動,隨意設置變更運行路線,隨意切換任務。車子運行無需網絡系統,互相之間可無線通訊,實現交通協管;
-
多重避障,作業更安全:上下雙激光避障,防撞條設置,叉尖光電等多重安全保障,讓作業無憂;
-
快速示教,快速落地:一鍵切換成搬運車模式,人工拉動行走一遍路線,機器學習路線,很快實現自動運行路線。

通用、功能全面
隨著近兩年無人叉車在各行各業應用的不斷滲透,市場需求開始復雜與多樣化,無人叉車的的應用也開始逐漸深入到各個場景。不同場景的拓展首先的挑戰是導航技術的適應性,尤其一些是涉及到室外場景的部分,還要考慮到天氣、地面環境等因素的影響等。同時,無人叉車的功能也更加全面,可以適應多種托盤、兼容各類屬具,具備自動裝車等高階功能且可運用于多種應用場景的產品開始涌現。
宇鋒智能——平衡重AMR機器人
宇鋒智能平衡重AMR機器人可進一步提升室內外場景堆垛轉運的靈活性和適用性,基于復合激光導航技術,根據不同的環境和任務需求進行自主調整和優化,重復叉取精度高;完善的故障自檢功能,360°安全避障和聲光警示全方位保駕護航;車體采用雙驅差速傳動設計,全交流配置;可根據場景需求可定制不同屬具,柔性化程度高。
井松機器人平衡重AGV不僅支持激光SLAM、反光板、混合導航等多導航方式,3.5T額定載重、4m/s最大行駛速度、2.2m最小轉彎半徑的亮眼參數!搭載360°多維防護裝置,安全更安心;大屏人機交互,上手快易操作;創新性自動裝車功能,解放人工更高效。具備自動俯仰、側移功能的貨叉,適用各類托盤、兼容多種屬具,對老舊路面擁有超強適應性,適用于貨物堆垛拆垛與稱重等多種應用場景。