海康機器人運維管理平臺的新版本實現(xiàn)了系統(tǒng)部署模式的全新升級,在迅捷部署、便捷登錄、服務運維、安全容災等方面進行全面優(yōu)化,為項目的快速交付和穩(wěn)定運行提供了更優(yōu)保障。
1
開放統(tǒng)一系統(tǒng)門戶
通過合并倉儲系統(tǒng)iWMS-1000與調(diào)度系統(tǒng)RCS-2000的訪問入口,采用統(tǒng)一的用戶登錄、用戶管理、權限管理、授權管理模塊,形成緊密的業(yè)務系統(tǒng)體系。用戶在登錄不同業(yè)務系統(tǒng)時,無須輸入多個系統(tǒng)地址、更換登錄賬戶,實現(xiàn)系統(tǒng)一致性。

2
支撐系統(tǒng)迅捷部署
該運維管理平臺還提供簡潔的操作指引,運維人員可快速完成多臺服務器的部署。在安裝過程中,如數(shù)據(jù)庫和消息隊列(MQ)等中間件無需逐一配置,安裝完成后,中間件將自動初始化,即可接入使用。
3
搭載HikRobot HA高可用集群系統(tǒng)
該平臺搭載HikRobot HA高可用集群系統(tǒng),通過容器化、可靠容災、集群等模式,實現(xiàn)多服務器的快速部署搭建,保障系統(tǒng)安全、可靠、高效的運行。
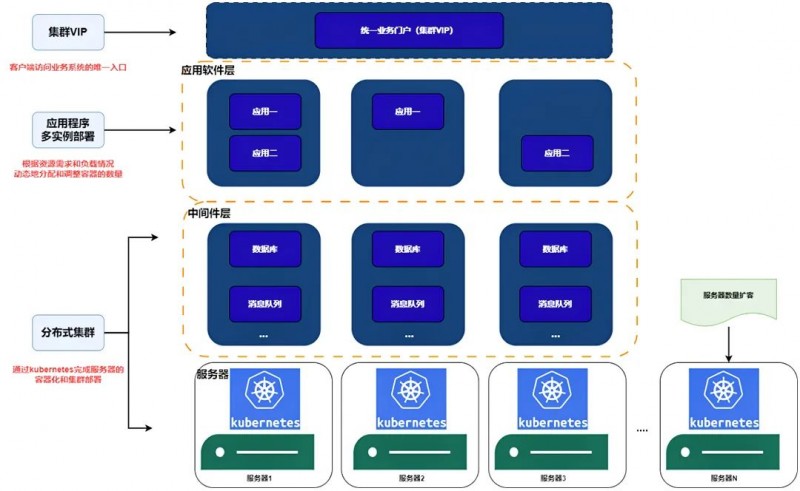
1 Docker容器化
容器化部署將應用及其依賴環(huán)境打包成輕量級、可移植的容器,實現(xiàn)了快速部署、高效資源利用和成本節(jié)約。與物理機或虛擬機相比,容器啟動快、資源占用少,且能跨平臺運行,大幅提高了開發(fā)運維效率和系統(tǒng)穩(wěn)定性。

2 集群及服務擴展
HikRobot HA高可用集群系統(tǒng)支持單機部署和多機集群部署兩種模式。在多機集群部署模式下,系統(tǒng)可將多臺服務器資源相互連接并協(xié)同使用,形成一個服務器資源集群,可靈活增加服務器數(shù)量,以擴展集群的性能。
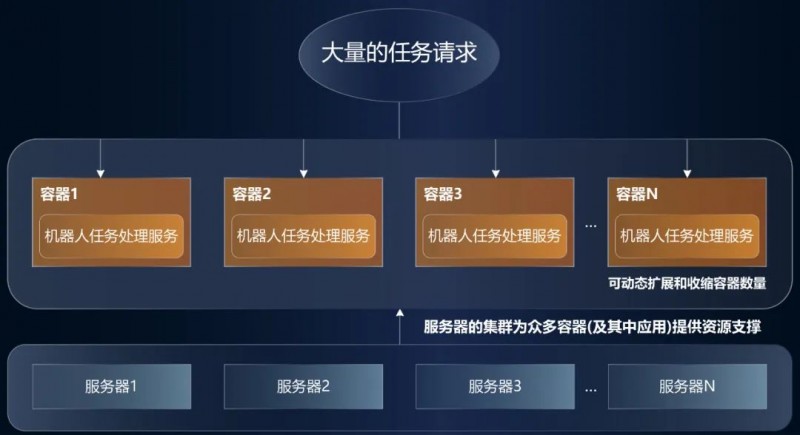
3 負載均衡和彈性伸縮
HikRobot HA高可用集群系統(tǒng)可將大量的任務請求分發(fā)到不同的容器上,同時,可以根據(jù)應用程序的資源需求動態(tài)分配容器數(shù)量。
當應用程序的負載增加時,系統(tǒng)可自動增加容器數(shù)量,當負載減少時,系統(tǒng)會自動減少容器數(shù)量以節(jié)省資源,以實現(xiàn)請求處理的負載均衡,確保資源得到充分利用,提高服務器資源的使用率。
4 可靠容災
HikRobot HA高可用集群系統(tǒng),通過將容器部署到多個服務器上,實現(xiàn)可靠的容災效果。若某個服務器或容器發(fā)生故障,系統(tǒng)可以自動排除該故障容器,并重新調(diào)度和啟動容器,確保應用程序的連續(xù)運行,減少單點故障的風險。

4
提供性能監(jiān)管工作臺
1 可視化數(shù)據(jù)呈現(xiàn)
該運維管理平臺開放控制臺,可集群中的各臺服務器資源進行整合、實時的監(jiān)管,通過可視化圖表,全覆蓋各種資源指標,幫助快速巡檢整體情況。
2 實時追蹤,精準定位故障
該平臺可實時記錄運行指標,并推送故障告警,輔助精確回溯故障現(xiàn)場,同時可覆蓋服務器、網(wǎng)絡、中間件、應用軟件等多層次的監(jiān)控指標,實現(xiàn)快速、精準定位故障。

5 多維度輔助運維提效
提供應用程序狀態(tài)管理和更新升級的操作臺,事前推送升級公告。
提供統(tǒng)一、便捷的應用程序日志下載入口,無需先連接進入服務器才能到不同應用的日志文件夾中拷取日志的多步操作。
提供一體化、安全的數(shù)據(jù)修改入口,能夠校驗并攔截不安全的數(shù)據(jù)修改操作。
自動完成數(shù)據(jù)安全備份、遷移和定期清理。
未來,海康機器人將繼續(xù)推動技術創(chuàng)新,不斷提升產(chǎn)品的性能和質(zhì)量,為客戶提供更強性能、更簡單易用和更安全穩(wěn)定的解決方案,以滿足客戶在數(shù)字化和智能化轉(zhuǎn)型中的需求。