近日,由人工智能物流產(chǎn)業(yè)聯(lián)盟主辦、曠視科技和《物流雜志與應(yīng)用》雜志承辦的“AI+物流燈塔直播間”第四期如期開講。本期直播邀請(qǐng)到北京科技大學(xué)教授、博士生導(dǎo)師、《物流技術(shù)與應(yīng)用》執(zhí)行主編趙寧教授,以《數(shù)字孿生與AI物流》為題進(jìn)行了分享。
具體來看,趙寧教授此次分享主要聚焦于以下3個(gè)方面:
1.數(shù)字孿生、AI物流、智能調(diào)度等概念的產(chǎn)生及發(fā)展。
2.數(shù)字孿生在智能物流領(lǐng)域應(yīng)用的原理基礎(chǔ)及發(fā)展現(xiàn)狀。
3.數(shù)字孿生和仿真等在多層穿梭車和KIVA機(jī)器人等系統(tǒng)調(diào)度研究中的應(yīng)用及科研成果。
Part1:數(shù)字孿生、AI物流、智能調(diào)度等概念的產(chǎn)生及發(fā)展
1.數(shù)字孿生:數(shù)字孿生是物理世界的數(shù)字化表示,2003年由Grieves教授首次提出。與傳統(tǒng)仿真相比,具有忠實(shí)映射、共同進(jìn)化、基于模型的優(yōu)化等特點(diǎn)。
2.智慧物流:利用集成智能化技術(shù),使物流系統(tǒng)具有思維、感知、學(xué)習(xí)、推理判斷和自行解決某些問題的能力。其發(fā)展呈現(xiàn)智能化、一體化/層次化、柔性化、社會(huì)化等趨勢(shì)。
3.智能調(diào)度:又稱基于知識(shí)的調(diào)度,即充分應(yīng)用有關(guān)問題域的知識(shí),盡可能減少組合爆炸,使最佳調(diào)度或組合問題獲得有效解決的調(diào)度方法。核心目標(biāo)是穩(wěn)、準(zhǔn)、快地找到最優(yōu)解。
4.物流仿真:對(duì)物流系統(tǒng)進(jìn)行系統(tǒng)建模,并在計(jì)算機(jī)上編制相應(yīng)應(yīng)用程序,模擬實(shí)際運(yùn)行狀況,并統(tǒng)計(jì)和分析模擬結(jié)果,用以指導(dǎo)實(shí)際物流系統(tǒng)的規(guī)劃設(shè)計(jì)與運(yùn)作管理。
5.數(shù)字孿生和其他相似技術(shù)的區(qū)別:
①數(shù)字孿生VS動(dòng)畫:動(dòng)畫本質(zhì)服務(wù)人類,非服務(wù)自然或工業(yè)系統(tǒng)。數(shù)字孿生不僅僅是對(duì)外部物理世界形象的鏡像反映,更重要的是對(duì)物流設(shè)備或者系統(tǒng)性能的模仿。
②數(shù)字孿生VS仿真:仿真分為連續(xù)系統(tǒng)和離散事件系統(tǒng)。物流仿真屬于離散事件系統(tǒng)仿真,其本質(zhì)是通過大量重復(fù)實(shí)驗(yàn),統(tǒng)計(jì)系統(tǒng)性能。
③數(shù)字孿生VS虛擬調(diào)試:虛擬調(diào)試的價(jià)值在于用低成本的計(jì)算機(jī)實(shí)驗(yàn)代替高成本的物理實(shí)驗(yàn)。二者區(qū)別在于物理仿真一般面向系統(tǒng),虛擬調(diào)試一般面向設(shè)備。
④數(shù)字孿生VS虛擬監(jiān)控:虛擬監(jiān)控即用虛擬仿真動(dòng)畫代替攝像頭拍攝現(xiàn)場(chǎng)視頻的技術(shù)。虛擬監(jiān)控受現(xiàn)場(chǎng)實(shí)時(shí)數(shù)據(jù)驅(qū)動(dòng),虛擬仿真是靠系統(tǒng)內(nèi)在邏輯驅(qū)動(dòng)仿真和動(dòng)畫。
Part2:數(shù)字孿生在智能物流領(lǐng)域應(yīng)用的原理基礎(chǔ)及發(fā)展現(xiàn)狀
智能物流興起的基礎(chǔ)是智能制造的飛速發(fā)展。現(xiàn)階段,隨著信息技術(shù)、物聯(lián)網(wǎng)和制造環(huán)節(jié)融合, “工業(yè)4.0”時(shí)代到來,其特征機(jī)器輔助人腦決策。其中,人工神經(jīng)網(wǎng)絡(luò)和智能算法是人工智能的重要技術(shù)層面。
在智能物流領(lǐng)域,對(duì)于物流設(shè)備來說,除通過來源于現(xiàn)場(chǎng)的數(shù)據(jù)來進(jìn)行“訓(xùn)練”外,數(shù)字孿生的出現(xiàn)讓其可以通過“仿真調(diào)度”自動(dòng)“試錯(cuò)”和優(yōu)化。具體來說,首先建立高保真的“仿真模型”,通過其反饋性能值來“優(yōu)化算法”(或人工神經(jīng)網(wǎng)絡(luò)等)。優(yōu)化后的算法可以調(diào)整決策參數(shù),進(jìn)而作用于仿真模型。
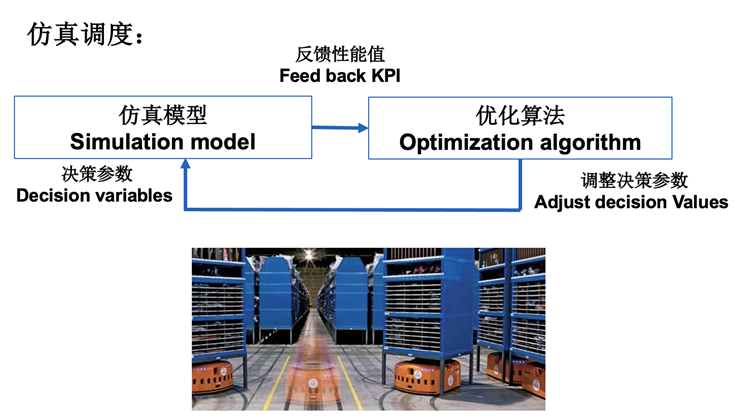
仿真調(diào)度原理展示
但是,現(xiàn)階段“調(diào)度應(yīng)用”存在一些現(xiàn)實(shí)問題:如調(diào)度模型難以完全考慮所有現(xiàn)實(shí)因素(多機(jī)器人的擁堵問題、死鎖問題);動(dòng)態(tài)信息難獲取(如機(jī)器人故障,異體檢測(cè));優(yōu)化目標(biāo)難確定(效率最高/路徑最短/命中率最高);約束難確定(空機(jī)器人可穿貨架,不可穿立柱;單行道/雙行道的選擇);調(diào)度算法評(píng)價(jià)難(在10個(gè)機(jī)器人倉(cāng)庫(kù)應(yīng)用良好的算法在100個(gè)機(jī)器人的倉(cāng)庫(kù)是否依然有效)等。
同時(shí),在“調(diào)度應(yīng)用”方面,則存在目標(biāo)不明確(除了動(dòng)畫,能解決什么問題);仿真建模完全定制成本高,周期長(zhǎng)、耗費(fèi)人力多;仿真結(jié)果與物理結(jié)果偏差大。仿真速度接近甚至慢于物理時(shí)間等問題。針對(duì)上述問題,趙寧教授表示,解決上述問題的終極方法就是面向AI物流的數(shù)字孿生。
Part3:數(shù)字孿生和仿真等在多層穿梭車和KIVA機(jī)器人等系統(tǒng)調(diào)度研究中的科研成果
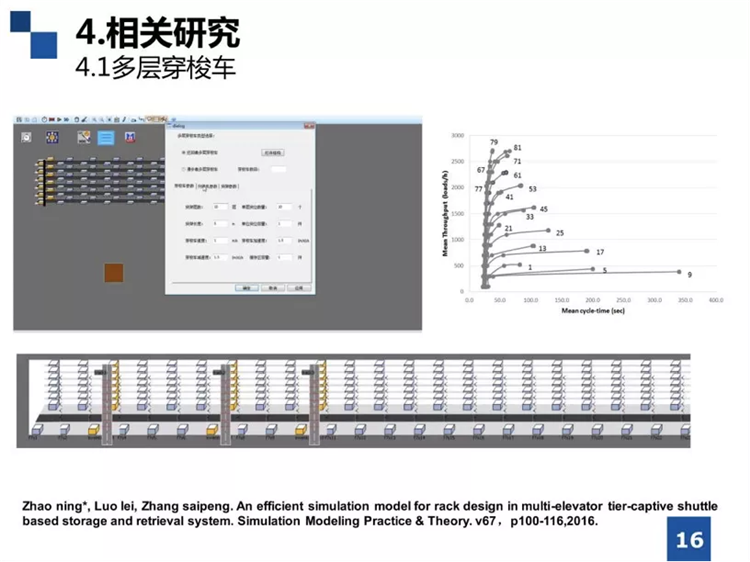
趙寧教授分享了有關(guān)多層穿梭車和kiva機(jī)器人的相關(guān)學(xué)術(shù)研究成果。比如多層穿梭車在設(shè)計(jì)的時(shí)候需要考慮層數(shù)、列數(shù)、排數(shù)及提升機(jī)數(shù)量等,會(huì)涉及很多不同方案的選擇。趙寧教授團(tuán)隊(duì)通過設(shè)定不同cycle-time(任何一個(gè)輸入庫(kù)任務(wù)耗費(fèi)的時(shí)間周期)下的throughput(單位時(shí)間內(nèi)的輸入庫(kù)數(shù)量)測(cè)定,探究數(shù)字孿生在多層穿梭車組合方案測(cè)定中的應(yīng)用價(jià)值。
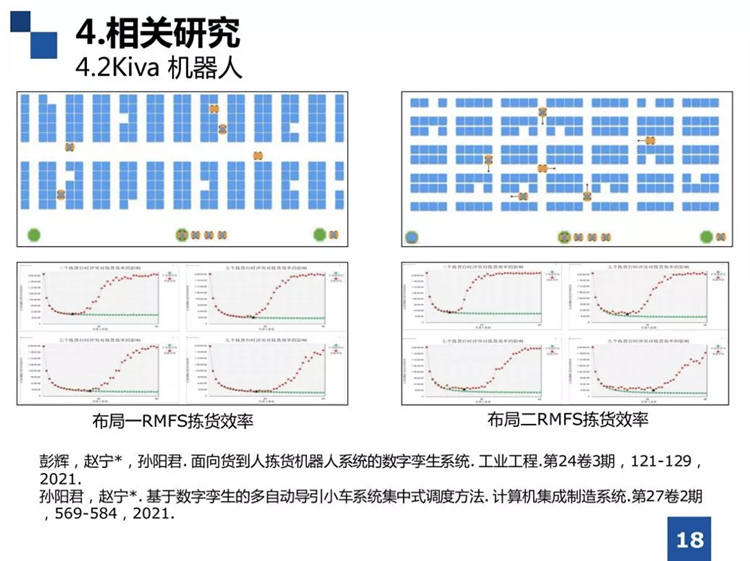
在Kiva機(jī)器人系統(tǒng)調(diào)度研究領(lǐng)域,通過在相應(yīng)仿真系統(tǒng)中設(shè)定不同的參數(shù),并內(nèi)置一些算法和模型,如機(jī)器人空載可穿貨架、機(jī)器人尋址、避讓等,讓仿真系統(tǒng)實(shí)現(xiàn)模塊化和參數(shù)化,從而實(shí)現(xiàn)大量的仿真調(diào)度實(shí)驗(yàn)。直播中,趙寧教授分享了一個(gè)例子:通過對(duì)比貨架橫置和豎置不同布局下的揀貨數(shù)量情況,得知貨架橫置更容易造成機(jī)器人擁堵的初步實(shí)驗(yàn)結(jié)果。
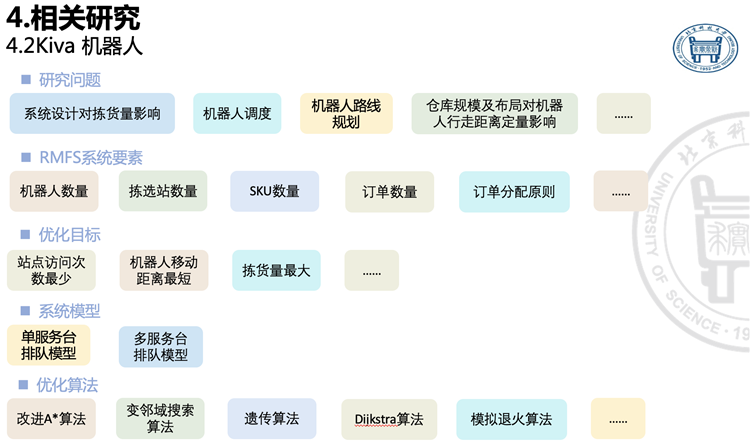
此外,趙寧教授介紹到,真正的物流仿真還涉及很多方面:如系統(tǒng)設(shè)計(jì)對(duì)揀貨量影響、機(jī)器人調(diào)度、機(jī)器人路線規(guī)劃、倉(cāng)庫(kù)規(guī)模及布局對(duì)機(jī)器人行走距離定量影響;RMFS系統(tǒng)要素如機(jī)器人數(shù)量、揀選站數(shù)量、SKU數(shù)量、訂單數(shù)量、訂單分配原則;優(yōu)化目標(biāo)如站點(diǎn)訪問次數(shù)最少、機(jī)器人移動(dòng)距離最短、揀貨量最大;系統(tǒng)模型單服務(wù)臺(tái)排隊(duì)模型、多服務(wù)合排隊(duì)模型;優(yōu)化算法如改進(jìn)A*算法、變鄰域搜索、遺傳算法、Diikstra算法、模擬退火算法等。
直播最后,趙寧教授對(duì)未來數(shù)字孿生和智能物流的發(fā)展方向和相關(guān)問題進(jìn)行了展望和預(yù)測(cè):
1.智能物流對(duì)傳統(tǒng)物流模式帶來極大變革,消滅了許多應(yīng)用人力造成的痛點(diǎn),同時(shí)帶來用好智能裝備的新需求。
2.智能物流系統(tǒng)的設(shè)計(jì)、調(diào)度、仿真一體化是有前景的應(yīng)用方向。
3.智能物流和數(shù)字孿生的結(jié)合是未來的方向。
4.調(diào)度的“穩(wěn)、準(zhǔn)、快”和仿真的“真、快”是發(fā)展核心,對(duì)物流裝備產(chǎn)業(yè)具有很強(qiáng)的應(yīng)用價(jià)值。
5.企業(yè)側(cè)重落地,高校側(cè)重前沿,物流裝備領(lǐng)域的創(chuàng)新需要企業(yè)和高校在研發(fā)層面深度融合。
更多精彩觀點(diǎn),請(qǐng)點(diǎn)擊下方鏈接觀看趙寧教授直播回放:
https://wx.vzan.com/live/tvchat-1550830926?v=1636685869559#/