近期,某汽車廠商的招標文件顯示,一個近2500臺貨架搬運AGV集采項目,對導航方式的技術要求提及視覺紋理導航。





什么是視覺紋理導航?
視覺紋理導航屬于視覺導航(V-SLAM技術)的范疇之一,通過AGV車載視覺傳感器獲取運行區域周的圖像信息來實現導航的方法。硬件上需要下視攝像頭,補光燈和遮光罩等來支持該種導航方式的實現,利用豐富的紋理信息,基于相位相關法和非均勻傅里葉變換來計算出兩圖間的位移和旋轉關系,實現圖像匹配,生成路徑地圖;從環境中獲取海量的、富于冗余的紋理信息,擁有超強的場景辨識能力,是全新的無軌導航技術路線。
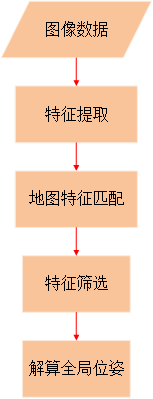
紋理導航算法首先對相機采集的圖像進行視覺特征提取,這里的視覺特征主要指點、線及結構特征等;然后,算法會將提取得到的特征與導航地圖庫中的特征進行匹配、篩選,得到地圖庫中對應的匹配特征,根據兩對特征的相互映射、轉換關系解算實時全局位姿,完成AGV設備的導航定位。
視覺紋理導航在視野被部分遮擋/污染,甚至大半部分遮擋/污染時,仍然能夠提供準確的導航定位信息,具有更強的魯棒性。
在場地長時間使用,積灰、污損嚴重的情況下,紋理導航可以根據單幀圖像的匹配情況,自行判斷是否需要進行地圖庫的特征更新,以適應地面環境的漸變,從而減少人工介入場地維護的頻率。
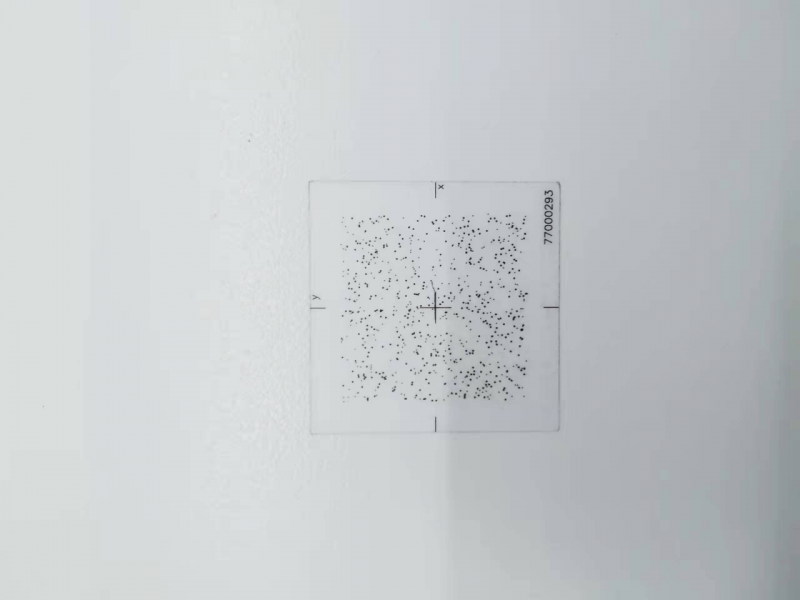
針對本身沒有視覺特征的場地,可以使用定制化的紋理碼解決方案。該方案能夠自動生成地圖特征庫,并定制指定顏色的紋理特征碼,使碼與環境地面融為一體,從視覺上減少場地中紋理碼的存在感,實現了場地美觀與高精度導航的融合。
視覺紋理導航在視野被部分遮擋/污染,甚至大半部分遮擋/污染時,仍然能夠提供準確的導航定位信息,具有更強的魯棒性。
在場地長時間使用,積灰、污損嚴重的情況下,紋理導航可以根據單幀圖像的匹配情況,自行判斷是否需要進行地圖庫的特征更新,以適應地面環境的漸變,從而減少人工介入場地維護的頻率。
針對本身沒有視覺特征的場地,可以使用定制化的紋理碼解決方案。該方案能夠自動生成地圖特征庫,并定制指定顏色的紋理特征碼,使碼與環境地面融為一體,從視覺上減少場地中紋理碼的存在感,實現了場地美觀與高精度導航的融合。
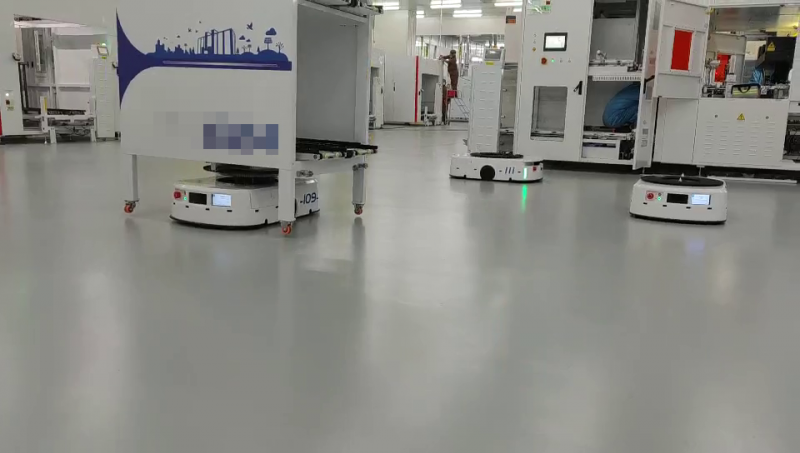
視覺紋理導航目前應用如何?
2019年新松機器人為國內某知名車企在總裝車間的儀表線、電池線、門段揀選線等產線提供數十臺物流配送AGV。項目在實施過程中,原定選用的是激光SLAM導航,由于部分生產線邊特征點不明顯,環境特征變化太多,導致SLAM導航精度不高,定位不準,影響了使用效率。經過分析后,新松輔以紋理導航解決了因局部區域特征變化較大而產生的問題。在特殊路段,通過對現場地面紋理的拍攝,與AGV本體已有紋理模型構圖進行比對,從而確定精確位置,提高了現場的導航精度和定位精度,滿足了客戶的使用效率要求。
合肥井松為上汽通用東岳打造的倉儲項目,整個倉庫共有貨架956個,每個貨架5層,可以存放料箱34416個,貨物種類與吞吐流量極為龐大。井松為倉庫布置了21臺視覺紋理導航機器人來實現整個倉庫的自動化搬運,通過中央調度系統進行智能分析,合理調配每一臺機器人完成各種物料的進出。
此外,怡豐機器人在珠海格力與杭州富士康項目中也使用了該導航技術
海康機器人為博世華域轉向首創Smart Log項目,于2019年開始前期籌備和規劃設計;致力于打造全場景、全連接、全過程整體集成的,端到端 精益、敏捷、智慧供應鏈。項目于2020年3月開始落地實施,并于2021年3月正式上線運行。項目分三期投入海康機器人潛伏及叉取AMR,作業范圍覆蓋南京工廠的生產車間、原材料倉庫、成品倉庫,涉及物流中心原材料的存儲、質檢、翻包、分揀、配送及成品配送、存儲等全流程業務,實現機器人調度系統RCS-2000與用戶倉儲管理系統WMS的對接,全程產線無縫切換,滿足南京工廠智能化物料搬運與精益化生產管理需求。
在某光伏行業的物料搬運流程中,華睿科技AGV將激光導航和視覺紋理導航相結合,充分發揮了各自的優勢,實現了復雜環境下的高執行效率和高定位精度。現場日均搬運任務多達15000+,24小時全天候運行,設備已穩定運行6個月,AGV紋理導航的穩定性、可靠性經過了充分的考驗,經過長期測試,設備的運行、對接精度也達到了毫米級的標準。
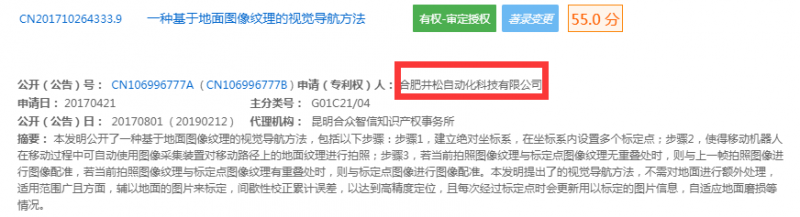
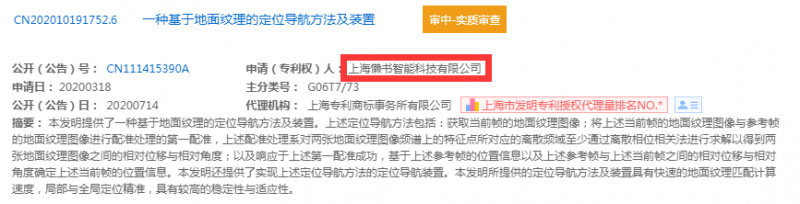
視覺紋理導航專利情況如何?
新戰略移動機器人產業研究所通過專利檢索發現,目前該導航方式為發明專利,主要專利人為合肥井松自動化科技有限公司與上海懶書智能科技有限公司所有,發明人均為劉詩聰。
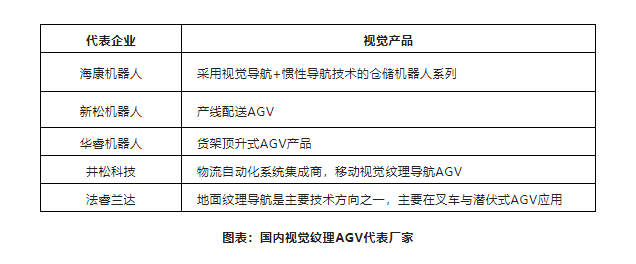
視覺紋理導航市場主要玩家?
視覺紋理導航是最近幾年年才被提及的技術,也落地了不少項目,視覺紋理導航的精準性與經濟性是其主要的優勢,在具備合適的地面情況下,紋理導航不失為一種選擇方案。
AGV的發展過程中,對車輛以及執行部件的定位精度要求也越來越高。雖然用于自動化流水線的視覺導航系統,可以做到0.1mm的定位精度,但基于無固定參照的視覺導航AGV,其定位精度往往不高(純視覺導航)。此外,視覺導航對光的依賴程度高,在暗處或者一些無紋理區域需要借助輔助傳感器。