
回顧無人叉車歷史,導航技術的進化無疑是行業發展最生動的注腳。

注:無人叉車導航技術的進化
早期的無人叉車需要軌道進行導航,如鋼鐵軌道導航、電磁導航、磁釘導航等,導航設施的部署和施工成本高。這一階段的導航方式可稱之為“強設施導航”。1990年后,行業逐步出現了如激光+反射板、彩色帶等導航方式,雖然場地設施的部署和施工成本大幅降低,但場地設施維護頻率隨之增加。這一階段的導航方式可稱之為“弱設施導航”。在導航技術受限于場地設施的模式下,無人叉車始終不能脫離場地設施獨立作業,作業路線相對固定,難以根據貨物變化作出調整。
進入21世紀后,以2D激光雷達(即單線激光雷達)為核心的自然導航技術在無人叉車領域興起,同時引入二維碼等導航技術,無人叉車進一步減少場地設施依賴,降低設施部署與維護成本,柔性化程度也得到進一步提升。
2D激光雷達可以幫助機器人規避障礙物,角頻率及靈敏度上反應快捷,掃描速度快、分辨率強、可靠性高,在測試周圍障礙物的距離和精度上比較精準。
但2D激光雷達僅能掃描一個平面,建立的2D地圖特征信息少,較難解決全局定位問題,成像缺乏高度信息,難以識別懸空障礙物,只能應用于布局相對簡單、固定的室內場景,難以滿足無人叉車在復雜場景的導航定位需求。
隨著工業與物流倉儲日趨緊迫的智能化需求,對無人叉車的靈活性、通用性和安全可靠性提出了更高的挑戰。這使得國內外一批頭部叉車企業,如杭叉、海康機器人、國自機器人、Agilox、Seegrid等,逐漸開始布局性能更優越的3D激光雷達導航避障技術,讓產業迎來導航技術升級的新氣象。
3D激光雷達,無人叉車“智能導航之眼”
3D激光雷達,可以同時發射及接收多束激光實現三維立體成像,廣泛應用于自動駕駛領域。隨著行業發展和需求升級,16線、32線等激光雷達產品也逐漸開始應用在無人叉車領域。
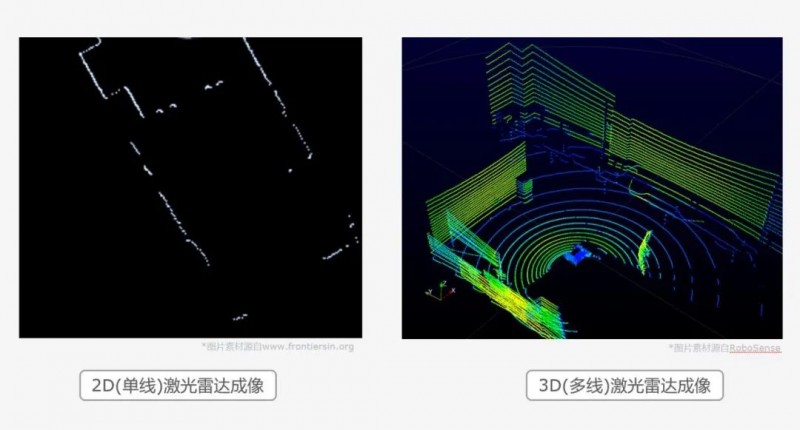
注:2D(單線)激光雷達成像(左);3D(多線)激光雷達成像(右)
從3D激光雷達與2D激光雷達的點云成像圖對比來看,可以發現,3D激光雷達可以掃描立體空間,輸出三維點云密集,物體與墻面立體輪廓清晰,反射率區分準確,為無人叉車實時定位導航避障提供大量精準可靠的信息支持。
另一方面,3D激光雷達具有對低反射率物體探測能力強、抗環境光干擾能力強、雨霧雪塵穿透能力強等優勢,可以通用于室內與室外復雜場景,相較2D激光雷達優勢顯著。
通過搭載3D激光雷達,無人叉車將大大提升其感知能力,獲得更高的作業效率、操作精度以及對室內外復雜場景的適應能力,從而實現柔性化、智能化應用,促進倉儲物流的智能化變革。
01
打通室內外場景應用,靈活適應不同作業需求
當前,市面上的無人叉車導航方案主要適用于室內場景。但實際上,除了倉庫內部物流,倉庫與戶外貨柜車、飛翼車、平板車之間的搬運與裝卸貨也是非常重要的環節。無人叉車要實現真正意義上的高效全流程作業,必須要能兼容室內外場景。
以未來機器人旗下VNE 20室內外平衡重無人叉車為例,VNE 20頂部部署了一臺RoboSense(速騰聚創)RS-Bpearl激光雷達。該雷達通過32束激光,構成360°×90°的半球型視場角,可以無死角探測車身周圍障礙物及地面地形變化。對于VNE20月臺裝卸貨的核心應用場景,RS-Bpearl激光雷達可以充分探測月臺地面斷崖的地形變化,準確識別月臺的形狀大小與邊緣位置,保護叉車免于掉落月臺。
結合未來機器人自研的視覺導航系統,VNE20車身的感知和控制能力有了極大提升,同時具備較強的抗干擾性,能夠應對室外環境的光線變化,自由穿梭在室內外場景,靈活適應不同作業要求。
02
導航避障一體化,優化傳感器部署數量
無人叉車的激光雷達主要分為避障和導航兩類功能。此前,無人叉車廠家會針對不同的功能需求選擇不同的產品,但近幾年,隨著無人叉車導航避障算法技術的發展,以及3D激光雷達成本的大幅下降,無人叉車行業開始嘗試將避障與導航的功能集中在一個激光雷達上來完成。這樣一方面可以相對減少叉車所搭載的激光雷達數量,降低成本;另一方面也能通過性能更優越的3D激光雷達和3D SLAM技術,幫助叉車實現更佳的導航避障效果。
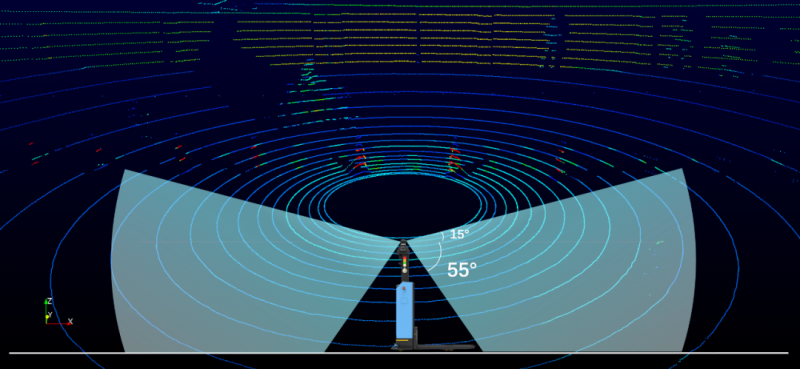
比如,仙工智能去年發布的自動叉車,搭載了RoboSense(速騰聚創)的32線激光雷達RS-Helios。該款激光雷達不僅提供水平零度線,而且擁有70°超廣垂直FOV(向下俯探 55°),這意味著一顆3D激光雷達即可實現定位導航與叉車行駛路徑上低矮物體的精準檢測,輕松實現導航避障一體化,這不僅讓自動叉車傳感器數量得到優化,同時增加對室外場景作業的支持。
注:部署于仙工智能自動叉車的 RS-Helios 垂直視場角示意圖與室外實時三維成像點云
值得一提的是,基于 RS-Helios 垂直方向大視場角與密集的激光掃描線數,仙工智能進一步研發了檢測貨物及貨架形狀大小的功能,實現貨物智能裝卸。
03
降本增效,推進無人叉車智能化進程
在過去很長一段時間里,無人叉車導航激光雷達的頭部市場被外商占據,叉車企業多使用國外廠商的2D激光雷達。國外的企業因發展較早,行業沉淀深厚,產品的穩定性和可靠性相對較高,由此其價格也長期保持在昂貴的萬元級別。特別受近年來疫情影響,國外單線激光雷達價格甚至還在不斷上漲。
隨著過去十年自動駕駛行業的發展,國產車載3D激光雷達的價格不斷下探,由十萬級別下降至萬元級別。在顯著的性價比面前,越來越多的廠商正考慮用國產3D激光雷達替代海外2D激光雷達。
以RoboSense(速騰聚創)為代表的國產激光雷達企業,也因此逐步進入無人叉車市場。作為智能激光雷達代表企業之一,RoboSense(速騰聚創)在智能駕駛領域已獲得比亞迪、路特斯、極氪、威馬等車企40余款車型定點合作的認可。目前,RoboSense(速騰聚創)旗下面向中低速自動駕駛領域的兩款激光雷達,RS-Bpearl與RS-Helios,已獲得仙工智能、木蟻機器人、Agilox、Seegrid等國內外頭部企業的應用,成為全球無人叉車行業的新寵。
從整個行業未來發展方向看,伴隨著應用場景的不斷深入,3D激光雷達的應用是無人叉車進一步走向智能化的必然趨勢,這也是國產激光雷達新的發展窗口。
而對于滲透率不足1%的國內無人叉車領域而言,無人叉車企業該如何借力國產感知導航技術產業鏈的綜合優勢,在后疫情時代做到降本增效,完成智能化跨越升級,在世界范圍內實現“彎道超車”,已經成為擺在明面上的命題。





