據中國移動機器人(AGV/AMR)產業聯盟數據、新戰略移動機器人產業研究所統計,2021年中國叉式移動機器人(含視覺導航)銷量達8000臺,同比增長60%,市場規模約為24.5億元,同比增長42.40%。
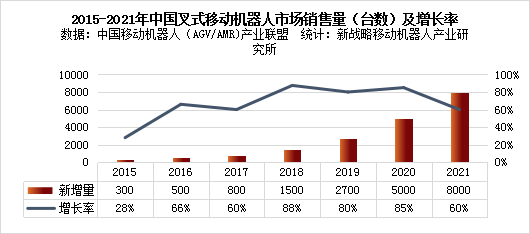


圖表:2015-2021年中國叉式移動機器人市場銷售量(臺數)及增長率
作為無人叉車代表企業之一,2021年,未來機器人完成訂單合同總金額增長300%,單筆合同平均金額增長150%,客戶重復采購率達到40%以上,落地項目大面積覆蓋制造工業、倉儲物流、機械制造等細分行業的“深水區”場景。
產品+方案雙管齊下,打通深水區全場景
“深水區”來源鄧小平一次講話:“中國的改革是摸著石頭過河。剛開始時在河邊,水比較淺,石頭比較好摸,現在進入深水區,石頭不好摸了。”未來機器人CEO李陸洋借用“深水區”,用來指代無人叉車面對的復雜多變的場景環境。
相比流程簡單,貨物標準,低位存取,平面搬運等相對簡單的淺水區場景,在“深水區”場景中,無人叉車需要應對人車混場、貨物亂放、載具不標準、貨車類型多樣化等因素,更加考驗無人叉車的單車作業峰值效率、操作精度和復雜場景適應能力。“深水區”場景也是客戶的痛點難點所在,圍繞這類痛點難題,未來機器人從產品和方案兩個方面進行突破,并積累了大量的項目經驗。
產品:E&O系列直擊行業痛點
2021年,針對行業場景痛點,未來機器人先后推出E系列與O系列,完成產品矩陣迭代升級。
E系列室內/外平衡重無人叉車:該系列產品解鎖外月臺裝卸這一核心場景需求,實現無人叉車室內外全場景應用。通過配置3D激光+視覺感知技術、多軸實時運動規劃技術以及高精度視覺伺服控制技術,E系列室內/外平衡重無人叉車具備應對光照變化的室外定位能力、三維環境感知能力、準確高效的視覺伺服控制能力,復雜多變環境下峰值效率可比擬人工作業峰值效率。
O系列全向無人叉車:該系列產品針對大體積、多變流程、復雜場景下的搬運。「O」系列全向無人叉車能實現360°中心回旋,零直角轉彎內半徑,全方位的任意移動,搭配車身的窄體式設計,實現窄通道內貨物存取、大體積(超長/超寬)物料的靈活運轉等,有效提升空間利用率和倉儲庫容率。
截止目前,未來機器人已經發布九大系列無人叉車,大面積覆蓋不同行業深水區場景需求。
方案:覆蓋深水區剛需場景
產品迭代升級,方案層同樣攻關克難,倉庫月臺作為貨物進出的剛需場景,無論是外部物料從卡車上卸下進入倉庫,還是倉庫內物料的運送裝上貨車,兩個看似簡單的流程都存在著作業效率低、安全性低、貨損率高等問題,對此,未來機器人早在2020年就實現了無人化裝卸解決方案,在2021年再次突破升級。
外月臺飛翼車無人裝卸
該解決方案在去年CeMAT ASIA 2021展會上首次對外正式發布,以VNE20及VNP15兩臺無人叉車,雙車雙流程還原演繹外月臺飛翼車無人裝卸場景。未來機器人自主研發的視覺導航系統和感知定位,使無人叉車具備強抗干擾性,抵抗室外強光干擾,高度的精確性足以媲美人工作業,對人/庫位/貨物等進行智能識別,達到全局定位與局部精準定位,提升無人叉車作業的效率,同時配置中控調度系統,匹配物流與信息流,實時監測無人叉車的運行狀態,完成多個叉車的實時調度。
外月臺廂式貨車無人裝卸
繼飛翼車之后,未來機器人繼續攻克難度等級幾乎為跨越式的廂式貨車無人裝卸場景,同時基于場景并在石化行業落地國內首個廂式貨車無人裝卸項目案例。
該項目配置的VNE20無人叉車基于未來機器人無人駕駛框架,采用視覺加激光定位方案,能夠應對光線變化的室外定位。無人叉車載貨進入狹長的車廂后,通過感知激光和視覺定位,在寬度為2.35m的車廂,貨物左右間隙小于30mm的環境內,完成兩列貨物18托的精準擺放,定位精確性達到幾乎可與人工作業媲美的程度。
此外,搭載未來機器人自主研發的中控調度系統,與客戶立庫WMS系統通過局域網對接,實現無人叉車任務調度和車輛調度功能。當司機將卡車停好,登車橋搭好后,在立庫系統下發出庫任務,立庫系統將目標裝車貨物運送至立庫出庫口,貨物到達輸送線末端后,輸送線PLC發送裝車需求信號給無人叉車中控系統,調度無人叉車叉取貨物進行裝車。
整個裝貨流程除卻在終端下發任務外,無需人工過多干涉,提升裝貨流程安全性,減少因人工搬運造成的貨物損壞情況,同時減少卡車等待時間,提升整體作業效率。
該方案為客戶帶來工廠裝卸效率大幅提升,縮短了卡車滯留等待時間,車隊利用率也隨之上升,節約了運輸成本;同時,提升了每個月臺的裝卸量,加快貨物進出庫速度,減少緩存區域面積,降低了我們的倉庫成本,實現從倉庫內部到貨物出庫裝車的全流程自動化。
除此之外,未來機器人還突破了國內6層以上料框堆疊、9.4米高位存取、2.0窄通道存取等多個首例,打造柔性解決方案,實現覆蓋外月臺裝車、料籠堆疊、貨物上下架、室外長距離運輸等核心剛需場景。
首個6層料框精準堆疊解決方案:以未來機器人無人叉車為操作機,針對多種規格、不同載重料框堆疊而開發,整體堆疊高度可達約5.3m,這是未來機器人面向工廠物流及倉儲物流,直擊無人化高位堆疊痛點一大行動和突破。
9.4米高位貨架密集存儲:采用R系列前移式無人叉車,突破9米高位存取應用。高位存儲的存在視野盲區,無人叉車采用激光末端感知 Laser Scanning,精準檢測放貨空間,貨物擺放精度控制在±20mm,確保貨物在高位存取時的安全性與精準度。
窄通道高頻密集存儲:采用SLIM系列托盤堆高式無人叉車,窄體式車身設計,最小直角轉彎通道寬度僅需1800mm,多種混合傳感器使得無人叉車具備較強的感知性能,能夠自適應檢測放貨空間、貨物位姿等。
伴隨著應用場景的不斷深入及應用領域的不斷拓展,未來,無人叉車解決方案能實現標準化復制嗎?未來機器人的銷售總經理謝立在接受新戰略移動機器人全媒體采訪時表示,目前工業物流場景較為復雜,行業領域差異化明顯,即便在同一行業中,不同的制造場景、生產流程、環節以及節奏也不相同,目前在制造場景中,未來機器人在普遍淺水區場景已經實現部分標準化復制,但在深水區場景還需要大量數據沉淀支持,無法做到完全復制,只能做到盡可能復制,這也是當前無人叉車行業的現狀。
謝立表示,“當前未來機器人在做的,就是用我們的技術去解決客戶現有的難題。”
軟硬實力構筑“未來”長跑基石
隨著機器人時代來臨,2021年,未來機器人的市場業務與規模量極速增長,累計落地項目350+,項目交付100%,客戶復購率達到40%以上。“未來”在無人叉車領域將要應對的挑戰與規劃,謝立認為,主要是圍繞企業的“軟硬實力”兩大方面出發。
軟實力:擴充團隊+提高產能
國內建立合肥工廠,1:1場景復制。未來機器人在2021年于安徽合肥建設生產調試基地,該基地一方面用于提升生產線產能,應對持續增長的項目需求。另一方面,該基地還原搭建了料籠堆疊、高位存取、窄通道存取等多種工業物流剛需復雜場景,用以實現創新性技術的突破與應用。
謝立介紹,“面對深水區場景,我們希望首先要在我們的工廠內對場景達到1:1復制,在正式落地之前達到客戶想要的效果,確認無誤之后才能實現出貨交付,同時也是縮短項目交付的時間。”
渠道賦能區域。當前未來機器人在行業內積極打通上下游合作供應商,在銷售模式方面增加以渠道賦能區域的路線,深度挖掘當地區域信息,以此逐步覆蓋全國渠道。
大力培養人才團隊。未來機器人正處于高速發展時期,去年未來機器人交付團隊人員擴招達到一百多人。據謝立介紹,現在公司對這批交付人員進行“老帶新”半年培訓,期間要經過兩到三個項目的磨練才能保證交付人員的熟練度從而保障項目的交付效率。
硬實力:技術場景持續攻克
視覺導航技術。作為國內最早將視覺導航技術應用在無人叉車的企業之一,未來機器人自主研發的“明眸”環境檢測系統是基于深度學習圖像識別技術,實現全局及局部末端對庫位情況、貨物位姿、置貨空間等信息的實時檢測。借助大數據和AI智能算法,系統能有效識別和跟蹤倉庫中的貨物、托盤、叉車和操作人員等對象,并將對象信息實時共享到用戶的倉庫管理系統,為企業提供庫位安全信息的同時,協同AGV、巡檢機器人等智能化設備的無人化作業。
攻克剛需場景。謝立提到,如何進一步提升無人叉車的高柔性和高精度以及作業的高效率,是未來機器人自成立以來所鉆研追求的方向,未來還將朝著這個目標對剛需復雜場景持續攻克,真正解決客戶的痛點需求,實現降本增效。同時,盡可能地打造標準化場景,實現項目規模化復制,為全行業提供解決方案。