在傳統的倉儲物流管理中,人工叉車和庫位管理是核心環節,但其高效運作往往受到多重限制:
• 路徑不優化,效率低
• 庫位信息滯后,調度混亂
• 安全隱患難控
為了解決這些問題,一些項目嘗試引入基于UWB技術的定位方案,用于優化叉車路徑和提升安全性。然而,UWB定位系統在實際應用中暴露出多重局限性:
邁爾微視 RTLS 解決方案:
重塑人工叉車定位與安全管理
邁爾微視專注物流倉儲自動化領域多年,深度聚焦行業痛點,與多家行業領先企業建立戰略合作,累計交付數萬臺3D視覺傳感器,穩居行業前沿。基于3D視覺傳感器,邁爾微視推出了人工叉車定位RTLS系統與庫位狀態識別系統,為倉儲物流提供一體化智能解決方案。
01 人工叉車定位系統
人工叉車定位系統通過在叉車頂部安裝3D視覺相機,捕捉天花板和墻壁的自然特征,實現1-5厘米的高精度定位,相較UWB的20-50厘米精度有顯著提升。同時,結合IMU輔助定位,確保在遮擋或視覺不足環境下的連續穩定定位。

邁爾微視基于視覺技術的RTLS解決方案,通過精確定位和靈活硬件支持,提供了比現有方案(如藍牙和UWB技術)更高精度、更低安裝成本及更快部署的選擇。同時,定位系統還可以與庫位狀態識別系統協同,實現貨物放置位置的動態追蹤,實時更新目標庫位狀態,避免無效操作,靈活調整任務分配和作業路徑。

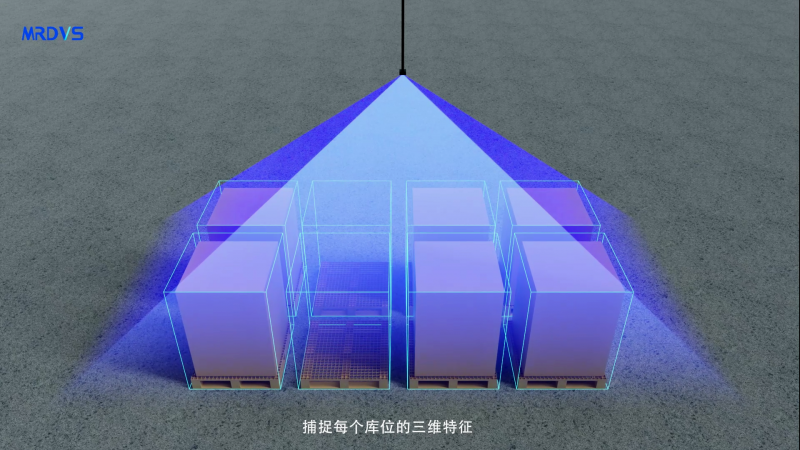
02 庫位狀態識別系統
邁爾微視采用RGB-D相機,提供庫位的三維數據與顏色信息,自動識別貨物有無、擺放規范性及異常占用情況。通過3D視覺智能AI系統,該方案還能區分貨物類別,并將數據輸出至調度系統,完成更加智能化的出入庫操作。核心特點包括:
03 RTLS與庫位識別的協同
通過RTLS定位系統與庫位狀態識別系統的深度協作,邁爾微視解決方案實現了叉車、貨物和庫位的統一管理,提升了作業調度的精準性和效率。