無人車概述 …
無人車,又稱自動駕駛汽車、智能汽車、自主汽車、自動駕駛汽車或輪式移動機器人,是一種通過計算機實現(xiàn)自動駕駛的智能汽車。
目前對于自動駕駛汽車的研究有兩條不同的技術路線:一條是漸進提高汽車駕駛的自動化水平;另一條是“一步到位”的無人駕駛技術發(fā)展路線。
無人車是自動駕駛的一種表現(xiàn)形式,它具有整個道路環(huán)境中所有與車輛安全性相關的控制功能,不需要駕駛員對車輛實施控制。
無人駕駛發(fā)展情況 …
目前來看,無人駕駛發(fā)展情況可分為國際、國內(nèi)兩部分。

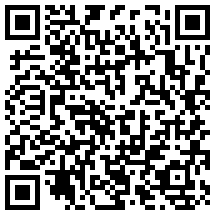
國際無人駕駛發(fā)展情況
國內(nèi)無人駕駛發(fā)展情況
無人車主要技術 …
精準定位技術
自動駕駛汽車的基礎是精準導航,不僅需要獲取車輛與外界環(huán)境的相對位置關系,還需要通過車身狀態(tài)感知確定車輛的絕對位置與方位。主要包括慣性導航系統(tǒng)、輪速編碼器與航跡推算、衛(wèi)星導航系統(tǒng)、自主導航系統(tǒng)等定位系統(tǒng)。
環(huán)境感知技術
環(huán)境感知作為基礎,處于自動駕駛汽車與外界環(huán)境信息交互的關鍵位置,利用攝像機、激光雷達、毫米波雷達、超聲波等車載傳感器,以及V2X和5G網(wǎng)絡等獲取汽車所處的交通環(huán)境信息和車輛狀態(tài)信息等多源信息,為自動駕駛汽車的決策規(guī)劃進行服務。
控制與執(zhí)行技術
自動駕駛汽車的車輛控制系統(tǒng)是自動駕駛汽車行駛的基礎,包括車輛的縱向控制和橫向控制。縱向控制,即車輛的驅動與制動控決策與規(guī)劃技術制,是指通過對油門和制動的協(xié)調(diào),實現(xiàn)對期望車速的精確跟隨橫向控制,即通過方向盤角度的調(diào)整以及輪胎力的控制,實現(xiàn)自動駕駛汽車的路徑跟蹤。
決策與規(guī)劃技術
自動駕駛汽車的行為決策與路徑規(guī)劃是指依據(jù)環(huán)境感知和導航子系統(tǒng)輸出信息,通過一些特定的約束條件如無碰撞、安全到達終點等,規(guī)劃出給定起止點之間多條可選安全路徑,并在這些路徑中選取一條最優(yōu)的路徑作為車輛行駛軌跡。
高精地圖與車聯(lián)網(wǎng)V2X技術
自動駕駛汽車的車輛控制系統(tǒng)是自動駕駛汽車行駛的基礎,包括車輛的縱向控制和橫向控制。縱向控制,即車輛的驅動與制動控制,是指通過對油門和制動的協(xié)調(diào),實現(xiàn)對期望車速的精確跟隨橫向控制,即通過方向盤角度的調(diào)整以及輪胎力的控制,實現(xiàn)自動駕駛汽車的路徑跟蹤。
注:V2X: vehicle to everything,即車對外界的信息交換技術
無人車在快遞物流領域應用情況 …
隨著我國網(wǎng)購興起帶來物流快遞行業(yè)的飛速發(fā)展,快遞數(shù)量的幾何式增長和配送人員之間的缺口會越來越大,算法、機器人、無人機和無人駕駛等智能制造手段將極大程度的緩解甚至解決這一矛盾。
無人車可稱移動智能快遞柜,每小時15公里,30個格口,每天投遞近百件,一次可投遞200公斤。
中國郵政:在多地也投放了無人配送車,其中南陵日均收寄業(yè)務量88件,仙桃市使用無人配送車累計配送實際業(yè)務超過300公里。中國郵政、中通等快遞企業(yè)也在試驗干線無人車技術,利用攝像機、激光雷達等傳感器,以及V2X和5G網(wǎng)絡等獲取汽車所處的交通環(huán)境信息和車輛狀態(tài)信息等多源信息,支撐干線運輸無人車自動行駛。


京東:2017年"6-18",京東首批試點運營的無人配送車在中國人民大學進行快遞投遞。2018年"6-18",在京東的北京上地配送站,20余臺配送機器人整齊列陣。隨著調(diào)度平臺命令發(fā)出,首批載有”6-18”貨物訂單的配送機器人依次出發(fā),自動駛向訂單配送的目的地。


蘇寧:落實在南京的蘇寧小店社區(qū)的“臥龍一號”,是一個深度結合物聯(lián)網(wǎng)、云計算、AI等最新技術描繪出來的一個無人配送快遞車,續(xù)航可達8小時。在智能感應方面主要采用多線激光雷達+GPS+慣導等多傳感器融合定位方式,融合激光雷達擁有更加靈敏的避障反應能力;在人機交互方面臥龍一號有著更加高效的地形適應能力,可以智能提示路過的行人、車輛和障礙物,為規(guī)劃出最優(yōu)繞行路徑提供依據(jù)。


無人車適用場景及流程 …
目前無人投遞車作為低速運行的末端作業(yè)車輛,結合無人車的技術發(fā)展及實際的試運行場景,基于安全性、適用性及可拓展性的考慮,選擇完全封閉或相對封閉的小區(qū)、園區(qū)、廠區(qū)、高等學府作為無人車投遞場景的應用主要模式。
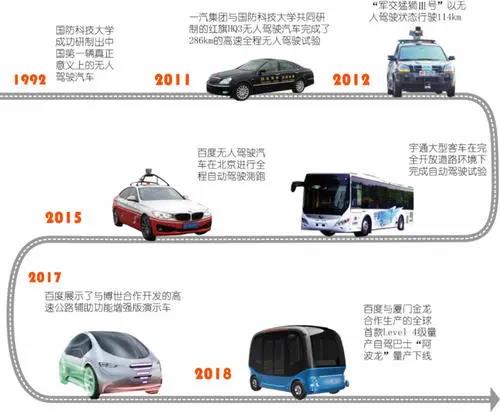
場景應用封閉小區(qū):投遞到戶模式
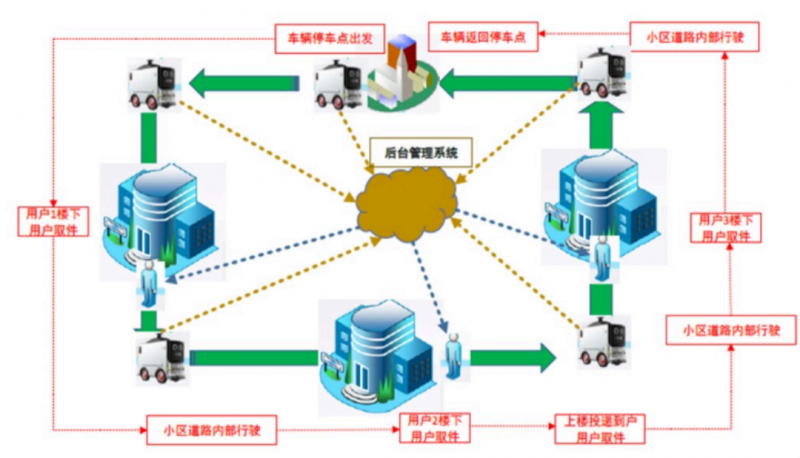
場景應用封閉小區(qū):固定點取貨模式
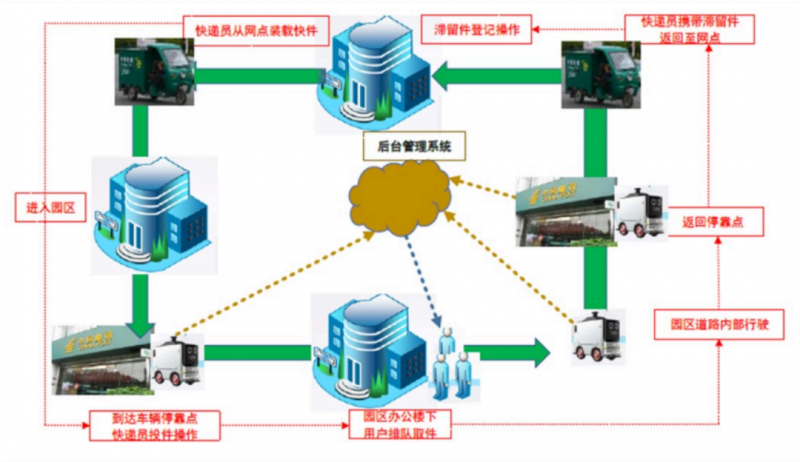
場景應用封閉園區(qū)
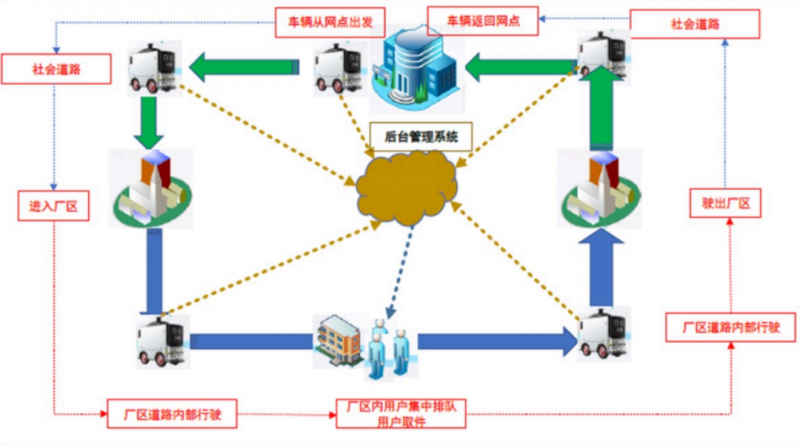
場景應用封閉廠區(qū)
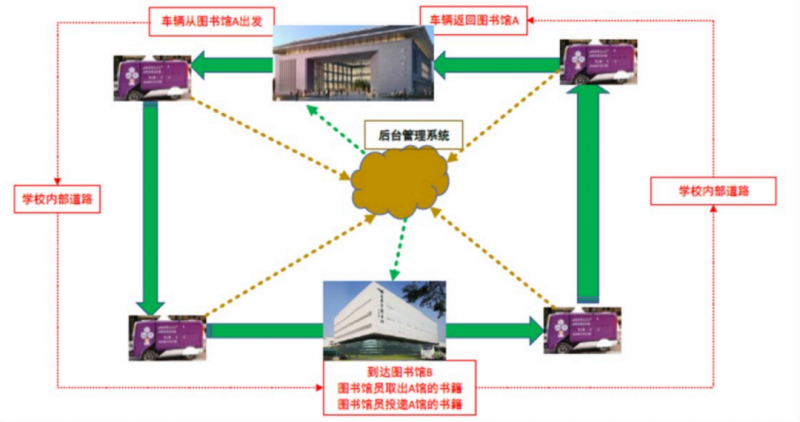
場景應用封閉校園
無人車的未來展望與趨勢 …
5G、AI、區(qū)塊鏈等技術的發(fā)展融合,是傳統(tǒng)物流業(yè)智能化轉型的關鍵方向,逐漸向"倉運配一體"的智慧物流發(fā)展。5G+V2X是無人駕駛的基礎,車輛能夠第一時間獲取路面全部信息做出決策,并與周邊聯(lián)網(wǎng)的物產(chǎn)生快速聯(lián)動。
隨著5G技術的出現(xiàn),單車智能與通信技術實現(xiàn)優(yōu)勢互補,一方面為無人駕駛的全方位信息采集提供豐富數(shù)據(jù)來源,另一方面為其智能決策提供算力支持。汽車和交通運輸相關服務由此前的信息服務,向安全與效率服務以及車路協(xié)同和自動駕駛服務演進,為物流運輸智能化、網(wǎng)聯(lián)化的能力提供保障。
未來,利用5G、AI等技術,解決無人駕駛存在的盲點難點,為無人車常規(guī)化量產(chǎn)化提供技術支撐。自動駕駛技術發(fā)展逐步在提高,相應的法律法規(guī)等支撐政策逐步完善,無人駕駛的應用場景也將在封閉半封閉的場景中進一步拓展,基于對已有場景及業(yè)務運行模式的調(diào)研及深入探討,無人駕駛將在更多更復雜的場景下得以成熟化運營。