
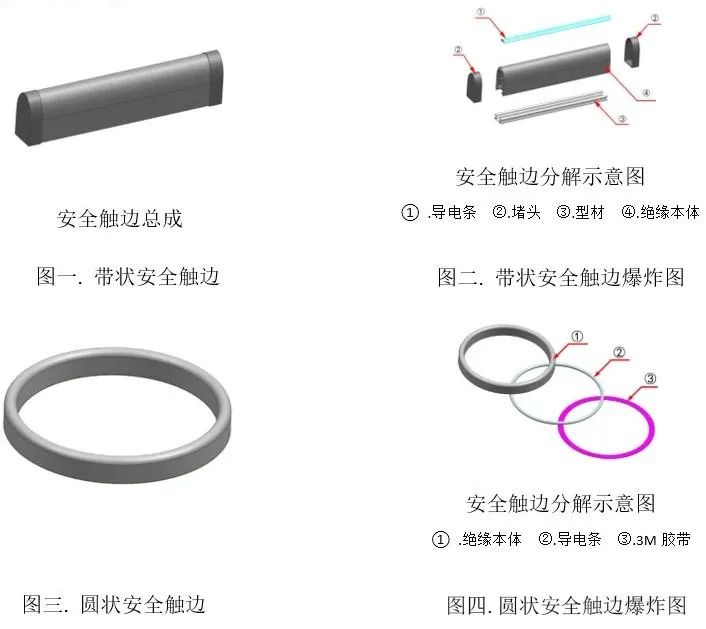
盡管AGV/AMR的定義是自動運行,其導航的智能化程度近年來也有了很大的提升,但在當前工業制造以及倉儲物流的大部分場景中,通常還是需要與人一起工作。因此,安全是AGV/AMR落地的首要前提。防撞條——AGV/AMR最后一道防線 安全系統是車體制造商發展難題的關鍵部分,AGV/AMR廠商通常通過在車體上加裝各類安全傳感器如防撞雷達、視覺相機等技術來實現車輛的安全運作。另外,為了更好地保護運行中的AGV/AMR,工程師在設計車體時,一般都會在車體外側安裝一排橡膠制品的防撞條,這是移動機器人在避障過程中的最后一道防線,因此防撞條成為車體一種基本安全配置被大量采用,為車輛的安全運行保駕護航。 AGV/AMR防撞條是一種安全接觸型開關,通過輕微的接觸、碰撞實現信號輸出達到對AGVAMR運動體進行控制。接觸開關能夠提供最大的安全保障,避免危險,即使是輕微地碰撞,也可以激發反應,從而起到保護作用。當車體受到外部擠壓或觸碰部件的邊沿位置時,這些柔性的安全邊緣開關就會被壓迫并傳送信號給動力源以停止這些部件的運動。 安裝安全觸邊的意義在于由于AGV通常會使用二維激光來感知現場情況,只能對激光平面內的物體進行識別檢測,但是用戶現場可能存在立體障礙物出現在AGV前進的道路上,激光是無法感知物體底部突起部分的,這時候突出來的下半部分就會觸碰到防撞條,AGV感知到防撞條觸發過后就會立刻停車。所以防撞條一般會安裝在激光無法掃描到的平面上,圍繞AGV車體外圍設計安裝,形成安全邊緣帶。 在AGV/AMR車體中防撞條成本并不算太高,這種簡單的接觸型開關機械原理也并不復雜,主要性能體現在生產工藝、材料以及傳感方式設計上,形成了對產品靈敏度、耐高低溫、安全性能等方面的標準要求。當前,在AGV/AMR領域,河北沃美諾的防撞條產品占據了絕大部分市場份額,其產品性能得到了行業客戶的廣泛認可。 創新工藝,沃美諾不斷提升產品性能 自進入移動機器人領域來,沃美諾通過對 AGV/AMR防撞條的深入研究,其產品技術水平斷提升。 沃美諾方面介紹,以往安全觸邊大多以帶狀(見圖一,圖二)或圓狀 (圖三,圖四)安裝在升降機、安全門、機床工作臺、自動無人小車、物流AGV小車、輪胎成型機等存在擠壓或剪切危險的移動部件邊棱上,安全觸邊被壓迫后傳遞信號給動力源以停止部件運動。
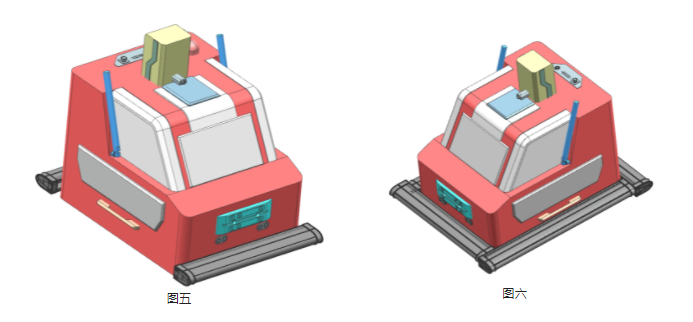
對于現有的四方形移動部件(以AGV小車為例),一方面是將帶狀安全觸邊直接放置在前后兩側(見圖五),減免因撞擊帶來的傷害;更多地是利用多個帶狀安全觸邊組成一個閉環安全觸邊總成(見圖六)更好的減少傷害。
閉環安全觸邊總成最大的優勢在于原有安全觸邊的基礎上幾乎沒有更改;同樣用螺絲將型材首尾相連和移動部件進行固定;結構簡單,固定方式也比較簡單。但受生產工藝的限制,無法避免安全觸邊二端盲區(見圖七)的產生,對客戶使用過程中不能完全避免移動部件撞擊所帶來的風險,同時產品美觀度上也較差。
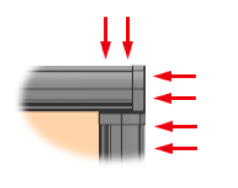
圖七.帶狀安全觸邊,首尾連接部位存在盲區
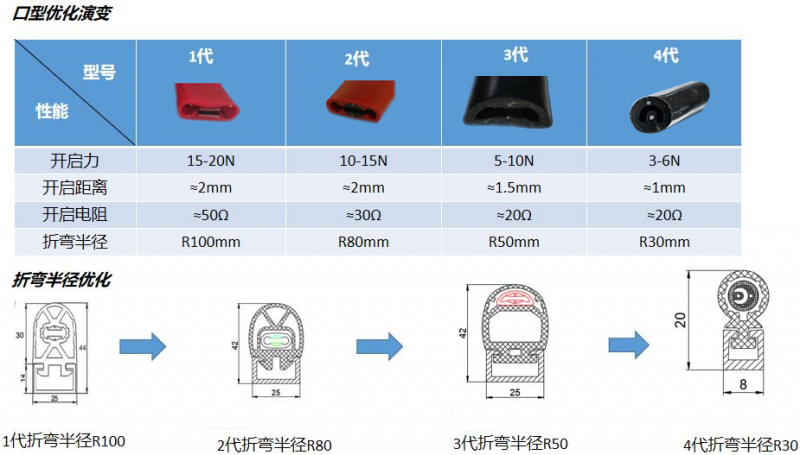
針對上述問題的解決方案,沃美諾從安全觸邊的性能(開啟力,開啟距離,開啟電阻及折彎半徑)及連接器結構進行改進提升優化。
經過公司多次試驗,其安全觸邊有了新的突破:安全觸邊折彎半徑(折彎半徑一般指的是最小折彎半徑,指在性能正常使用的情況下所能彎曲半徑的最小半徑)由第三代折彎半徑R50提升至第四代R30,同時膠條防夾范圍也由此前的防夾90°改進提升至180°(見圖八),實際應用場景實現了無死角的防夾,安全觸邊的改進大大減小了移動部件對被撞擊者的傷害。
圖八
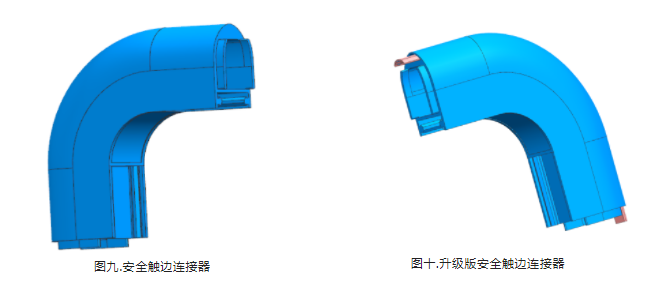
同時安全觸邊連接器由原來的整個轉角盲區(連接器中間無法穿入導電條,見圖九)提升到了現在的升級版安全觸邊連接器(見圖十);升級后的安全觸邊完全消除盲區的也將兩側導電條連接了起來,同時也提升了整體外觀的美觀度。
以沃美諾代表產品A61-R50連接器為例,其結構如下(見圖十一)
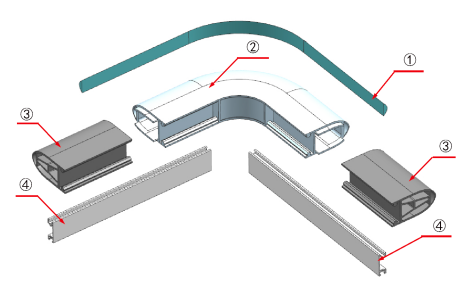
圖十一. 安全觸邊R50連接器 ①.導電條 ②.連接器 ③.本體 ④.型材
圖十二. 安全觸邊R50連接器
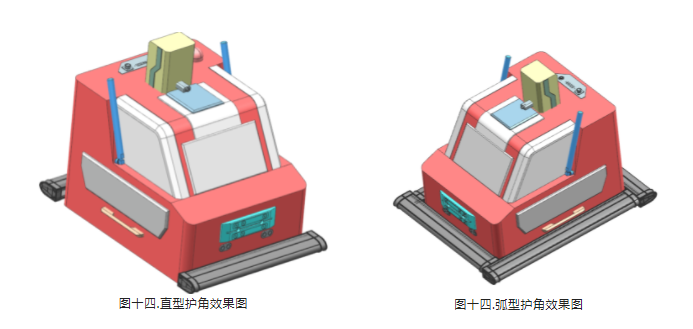
升級后的安全觸邊連接器裝起來效果要好的多(圖十四),總體來看使用安全觸邊連接器將兩側觸邊連接后,既保證了安全性同時又保證了產品的美觀性。
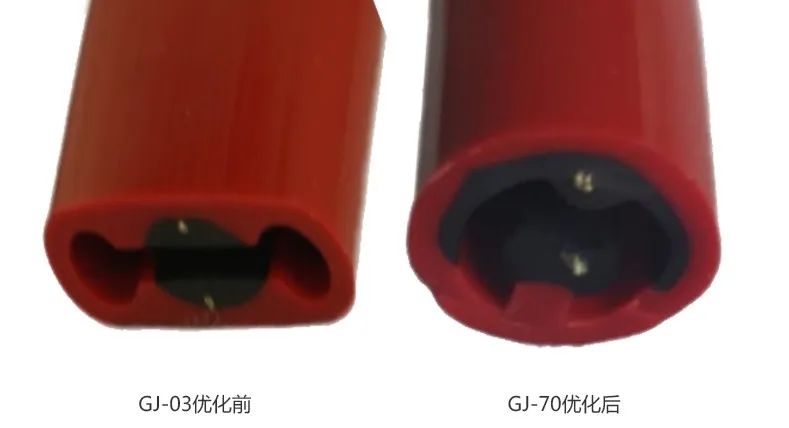
伴隨著技術的發展,移動機器人正在開始逐步從室內走向室外,與室內應用的移動機器人相比,在室外環境中,AGV/AMR對對安全觸邊靈敏度、耐高低溫、安全性能等方面的標準要求也越來越高。 針對室外場景特點,為了提升安全觸邊的感應角度和按壓反應壓力值,沃美諾結合汽車產業的產品結構經驗,對觸邊產品的口型結構進行工藝的升級優化,使其在功能性能方面有了明顯提升。同時積極探索出生產新工藝 “兩端封頭一體注壓工藝”,并在試裝驗證方面得到了良好的反饋。一體鑄壓工藝相較傳統粘接工藝,密封性能更加優良,防水防塵性能優越,很好地滿足了室外場景移動機器人的需要。
閉環安全觸邊總成最大的優勢在于原有安全觸邊的基礎上幾乎沒有更改;同樣用螺絲將型材首尾相連和移動部件進行固定;結構簡單,固定方式也比較簡單。但受生產工藝的限制,無法避免安全觸邊二端盲區(見圖七)的產生,對客戶使用過程中不能完全避免移動部件撞擊所帶來的風險,同時產品美觀度上也較差。
針對上述問題的解決方案,沃美諾從安全觸邊的性能(開啟力,開啟距離,開啟電阻及折彎半徑)及連接器結構進行改進提升優化。
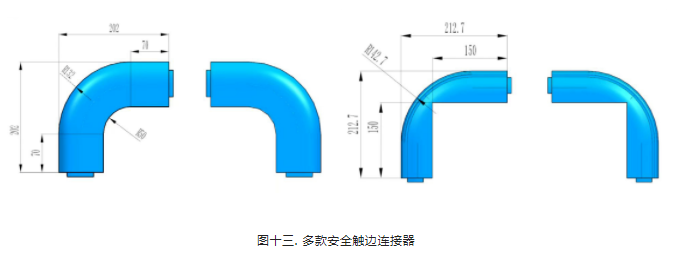
同時為了和客戶移動部件更好地配合組裝安全觸邊,沃美諾一次性開發了多款口型安全觸邊連接器(用的比較多的兩款口型見圖十二);以配合內圓角分類,可分為直角連接器,R50連接器及R80連接器(見圖十三)。當這三種連接器都無法達到客戶的完美要求時,沃美諾還可根據客戶提供的安全觸邊安裝區域數據進行個性化定制。
圖十二. 安全觸邊R50連接器
沃美諾CEO田新躍曾向新戰略移動機器人全媒體記者表示,在市場需求以及用人成本的影響下,推動了AGV/AMR行業的發展進程,同時行業間的競爭也愈發明顯,更新換代頻率加快,“我們作為安全防護產品供應商,研發壓力逐漸明顯,為應對這樣的局面,未來,沃美諾將在珠三角建設研發商務中心,引進大量高科技技術人才,加大科技研發,深入了解行業需求,進一步推動產品創新及質量提升。”





