
近年來,得益于全球各國政府的積極政策扶持以及市場需求的強勁增長,移動機器人行業進入了一個繁榮的發展階段。該行業的市場規模呈現出穩定的增長趨勢。此外,半導體芯片制造業作為移動機器人等高科技產業的基礎支柱,其重要性不斷凸顯。
因此,鑒于長遠的發展前景,領先的半導體企業如英特爾公司已經在移動機器人領域的芯片設計、平臺構建、及軟件開發等關鍵領域實施了多元化的戰略部署。
從精密工業應用至泛化商業部署
積淀深厚的行業專精
移動機器人應用場景主要分為工業領域和商業場景兩大類。工業領域移動機器人應用由來已久,目前已經進入了一個相對成熟的發展階段,而商用移動機器人的應用雖起步晚,但近年來也在技術和需求助推下加速發展,落地規模不斷擴大。

工業移動機器人與商用移動機器人的需求呈現出顯著的差異性。工業移動機器人的需求主要集中在提高生產效率、保證操作精度以及實現復雜任務的自動化上。這類機器人通常在制造、物流和倉儲等環境中被部署,以執行精確的搬運、組裝、檢測和包裝等工作。它們必須滿足高可靠性、強耐用性和易于集成進現有工業控制系統的要求。相比之下,商用移動機器人則更注重靈活性、用戶友好性和成本效益。它們廣泛應用于零售、醫療、酒店和清潔等服務行業,旨在提升客戶體驗、減輕人力負擔和優化服務流程。商用機器人通常需要具備較高的交互能力,以適應不斷變化的消費者需求和多樣化的操作環境。此外,它們還需具備一定程度的自適應能力,以便在非結構化的環境中安全高效地工作。同時,商用移動機器人領域對成本控制持有高度敏感性,產品設計需在確保性能標準的同時,采取各種措施壓縮成本,以提升性能與成本之間的比值,實現更優的成本效益比。

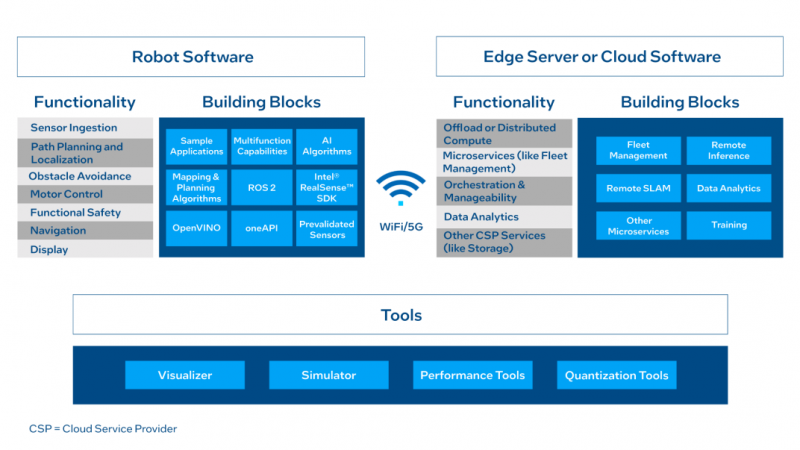
應對商業與工業的特性,英特爾推出了能適應不同需求的產品方案,迅速賦能客戶。公司構建了一個集成硬件、邊緣計算、性能優化和技術創新的解決方案矩陣,旨在推動中國AGV/AMR產業的智能化轉型,并深化對移動機器人關鍵技術及多場景應用需求的理解。

英特爾將移動機器人的三大核心能力界定為感知、規劃和執行。這涉及到利用先進的傳感器陣列來捕獲環境數據,運用這些數據進行復雜的自主決策和路徑規劃,并且動態地調整以適應環境變化。最終,這些規劃結果被轉換為精確的控制指令,驅動電機和驅動系統等執行機構。多年來,移動機器人行業一直致力于在這三個關鍵領域進行技術突破,旨在提升機器人的環境感知精度、獨立規劃效率以及執行動作的準確性和響應速度。
硬軟件方案協同,全面賦能移動機器人
針對移動機器人在感知、規劃及執行等關鍵能力方面的需求,英特爾依托其深厚的技術積累,開發了一系列高性能產品,以此加速移動機器人行業的技術進步和應用普及。
在感知方面,英特爾®實感™(Intel®RealSense™)深度攝像頭能夠生成AMR所需的RGB和depth深度數據,特定的型號如D435i,D455/457還集成了IMU傳感器,更適合AMR的導航和定位等場景,也簡化了產品開發。
在規劃方面,從入門級的英特爾凌動®/賽揚®系列,到中端的英特爾®酷睿™i3/i5系列,再到高端的英特爾®酷睿™i7,英特爾提供一系列的CPU產品,幫助用戶開發AMR平臺。集成的顯卡則增加了AI計算的能力,通過OpenVINO的優化,可以將AI的算法運行在iGPU上。其最新推出的英特爾®酷睿™Ultra平臺,更是集成了專用的NPU計算單元,AI運算效率更高,且功率消耗更低。

在執行方面,針對移動+操作的應用場景,英特爾提供工業邊緣控制軟件平臺ECI,對Linux kernel進行實時性調優,集成PREEMPT_RT和Xenomai的實時補丁,以達到更好的實時性能。此外,英特爾還提供實時的EtherCAT master stack和CANopen stack,方便不同類型的伺服器和電機接入,并支持一些簡單的運動控制模塊參考設計。
為了進一步助力客戶加速產品化進程,并更加注重實際應用的落地,英特爾還提供了一系列軟件工具。這些工具旨在簡化開發流程,優化產品性能,并確保解決方案的快速部署和高效運行。
例如,英特爾的Robotics SDK提供了一套全面的軟件算法解決方案,包括視覺同步定位與地圖構建(VSLAM)技術,該技術結合英特爾®實感™(Intel®RealSense™)攝像頭,能夠快速實現自主移動機器人(AMR)的地圖構建和精確定位導航。此外,針對提升群體智能,英特爾推出了多機協同建圖(Collaborative SLAM)的參考軟件,該軟件搭配英特爾研發的特征點提取和匹配算法,顯著提升了在大規模場景中多AMR協同作業的SLAM建圖效率。針對特定應用場景中的地面不均勻或傾斜問題,英特爾還開發了地面分割(Groundfloor Segmentation)算法,確保AMR在復雜地形中的穩定運行和適應性。這些先進的軟件工具和算法,為客戶提供了強大的技術支持,使得AMR能夠更加高效、靈活地部署于各種工作環境。
結語:目前,英特爾在移動機器人方面的業務正穩步增長中。透過英特爾的發展,看到了移動機器人對算力需求的永無止境。未來,隨著萬物數字化開展,“四大超級技術力量”將超越并改變世界。我們還需要英特爾等產業鏈企業持續“破壁”,不斷增長的算力將激發移動機器人產業創新力,引領行業發生新一輪變革。
從精密工業應用至泛化商業部署
工業移動機器人與商用移動機器人的需求呈現出顯著的差異性。工業移動機器人的需求主要集中在提高生產效率、保證操作精度以及實現復雜任務的自動化上。這類機器人通常在制造、物流和倉儲等環境中被部署,以執行精確的搬運、組裝、檢測和包裝等工作。它們必須滿足高可靠性、強耐用性和易于集成進現有工業控制系統的要求。相比之下,商用移動機器人則更注重靈活性、用戶友好性和成本效益。它們廣泛應用于零售、醫療、酒店和清潔等服務行業,旨在提升客戶體驗、減輕人力負擔和優化服務流程。商用機器人通常需要具備較高的交互能力,以適應不斷變化的消費者需求和多樣化的操作環境。此外,它們還需具備一定程度的自適應能力,以便在非結構化的環境中安全高效地工作。同時,商用移動機器人領域對成本控制持有高度敏感性,產品設計需在確保性能標準的同時,采取各種措施壓縮成本,以提升性能與成本之間的比值,實現更優的成本效益比。
應對商業與工業的特性,英特爾推出了能適應不同需求的產品方案,迅速賦能客戶。公司構建了一個集成硬件、邊緣計算、性能優化和技術創新的解決方案矩陣,旨在推動中國AGV/AMR產業的智能化轉型,并深化對移動機器人關鍵技術及多場景應用需求的理解。
硬軟件方案協同,全面賦能移動機器人
在執行方面,針對移動+操作的應用場景,英特爾提供工業邊緣控制軟件平臺ECI,對Linux kernel進行實時性調優,集成PREEMPT_RT和Xenomai的實時補丁,以達到更好的實時性能。此外,英特爾還提供實時的EtherCAT master stack和CANopen stack,方便不同類型的伺服器和電機接入,并支持一些簡單的運動控制模塊參考設計。
例如,英特爾的Robotics SDK提供了一套全面的軟件算法解決方案,包括視覺同步定位與地圖構建(VSLAM)技術,該技術結合英特爾®實感™(Intel®RealSense™)攝像頭,能夠快速實現自主移動機器人(AMR)的地圖構建和精確定位導航。此外,針對提升群體智能,英特爾推出了多機協同建圖(Collaborative SLAM)的參考軟件,該軟件搭配英特爾研發的特征點提取和匹配算法,顯著提升了在大規模場景中多AMR協同作業的SLAM建圖效率。針對特定應用場景中的地面不均勻或傾斜問題,英特爾還開發了地面分割(Groundfloor Segmentation)算法,確保AMR在復雜地形中的穩定運行和適應性。這些先進的軟件工具和算法,為客戶提供了強大的技術支持,使得AMR能夠更加高效、靈活地部署于各種工作環境。





