隨著光伏行業自動化生產與海外設備需求劇增,行業智能化升級迫在眉睫。當前,光伏組件生產中的接線盒安裝與鋁邊框上料仍依賴人工,生產效率及穩定性、可靠性提升難度較大。
由此海康機器人推出了3D視覺引導光伏接線盒上下料、光伏板封邊型材抓取兩大方案,輕松搞定無序/有序抓取,助力光伏組件環節自動化與智能化。
3D視覺引導光伏接線盒上下料
光伏接線盒是光伏發電系統中起連接和保護的必要組件,其主要作用是將太陽能電池中產生的電力與外部相連接,是電流傳導的橋梁。
Q:種類繁多,來料無序
光伏接線盒上料屬于整個組件生產的后端工序,由于種類繁多、來料無序、表面材質黑色吸光,傳統只能通過人工上料安裝或者“人工理料+機構輔助”的方式進行上料裝配,人工依賴性強,上下料效率有限。
A:3D視覺無序抓取方案
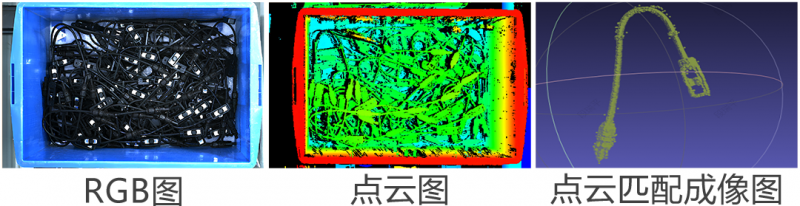
海康機器人使用激光振鏡立體相機對料框進行定位,實現動態障礙物識別,結合實例分割+3D點云匹配準確定位接線盒,配合工件與抓取點選解排序算法,實現最優抓取策略,引導機器人從料框中抓取散亂堆疊的光伏接線盒。
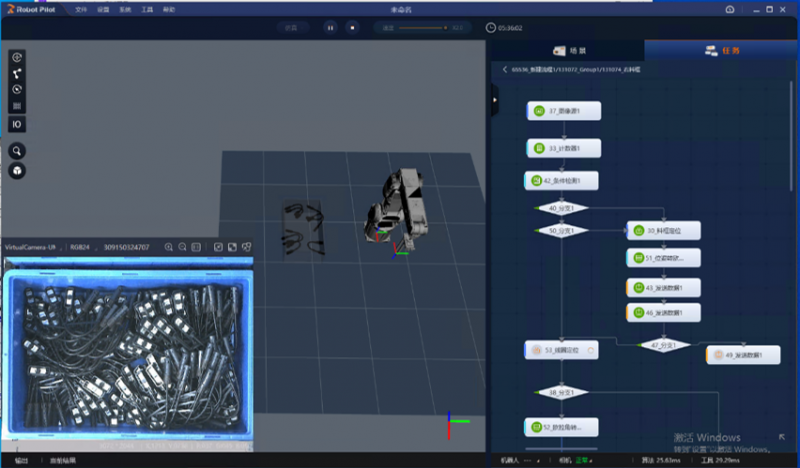
成像效果
方案優勢
激光振鏡立體相機,可獲取高質量、完整的光伏接線盒、線束、扎帶的點云
超級AI模型,可適配市面上主流的接線盒類型,如O型、X型、U型等
支持主流機器人品牌一鍵手眼標定,支持適配工件免抓取點注冊
抓取效率高,視覺系統處理節拍≤3s/pcs
抓取成功率高,≥99%
3D視覺引導光伏板封邊型材抓取
太陽能光伏板是太陽能系統中的核心部分,其作用是將太陽能轉化為電能,或送往蓄電池中儲存起來。由于單體太陽能板不能直接作為電源使用,作電源必須將若干電池串、并聯起來,并嚴密封裝成組件。
Q:型材正反面放置異常
傳統生產使用“人工+彈夾”的方式進行鋁邊框型材上料,工作強度大,易出現型材正反面放置錯誤等異常情況,影響整體生產效率。
A:3D視覺有序抓取方案
為解決上述問題,海康機器人提供兩種解決方案。
方案1:中部抓取
如客戶提供型材長度方向的坐標信息,可選擇使用激光振鏡立體相機拍攝型材中間部位,RP處理后輸出一組型材抓取點引導機械臂進行抓取。
抓取示意
成像效果

方案2:兩端抓取
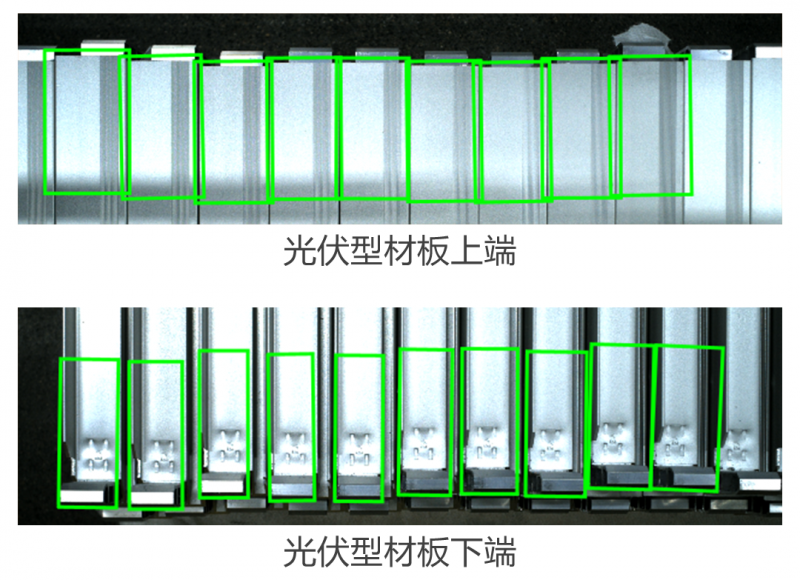
如客戶不提供信息,若使用工業機器人,可使用一臺激光振鏡立體相機分別在型材兩端拍照;若應用在桁架系統上,可以使用兩臺激光振鏡立體相機,分別在型材的兩端進行拍攝。拍攝取圖后在算法內部進行點云融合定位,完成多根型材排列融合輸出一組型材的抓取點。
抓取示意
成像效果
方案優勢
采用激光振鏡立體相機,亞毫米級精度
支持根據型材料框規則程度,給出最優型材抓取策略
支持型材正反識別,支持非滿托型材拆垛
支持隔離紙定位去除
抓取效率高,視覺系統處理節拍≤2.5s/pcs
應用案例
由此海康機器人推出了3D視覺引導光伏接線盒上下料、光伏板封邊型材抓取兩大方案,輕松搞定無序/有序抓取,助力光伏組件環節自動化與智能化。
3D視覺引導光伏接線盒上下料
光伏接線盒是光伏發電系統中起連接和保護的必要組件,其主要作用是將太陽能電池中產生的電力與外部相連接,是電流傳導的橋梁。
Q:種類繁多,來料無序
光伏接線盒上料屬于整個組件生產的后端工序,由于種類繁多、來料無序、表面材質黑色吸光,傳統只能通過人工上料安裝或者“人工理料+機構輔助”的方式進行上料裝配,人工依賴性強,上下料效率有限。
A:3D視覺無序抓取方案
海康機器人使用激光振鏡立體相機對料框進行定位,實現動態障礙物識別,結合實例分割+3D點云匹配準確定位接線盒,配合工件與抓取點選解排序算法,實現最優抓取策略,引導機器人從料框中抓取散亂堆疊的光伏接線盒。
安裝方式 |
Eye-to-hand (固定式安裝) |
架設高度 |
相機架設于料框正上方,相機鏡頭位置與料筐上 平面距離1200mm |
覆蓋視野 |
在該拍攝距離下,相機可覆蓋最大視野約 520*580mm(L*W) |
方案優勢
激光振鏡立體相機,可獲取高質量、完整的光伏接線盒、線束、扎帶的點云
超級AI模型,可適配市面上主流的接線盒類型,如O型、X型、U型等
支持主流機器人品牌一鍵手眼標定,支持適配工件免抓取點注冊
抓取效率高,視覺系統處理節拍≤3s/pcs
抓取成功率高,≥99%
3D視覺引導光伏板封邊型材抓取
太陽能光伏板是太陽能系統中的核心部分,其作用是將太陽能轉化為電能,或送往蓄電池中儲存起來。由于單體太陽能板不能直接作為電源使用,作電源必須將若干電池串、并聯起來,并嚴密封裝成組件。
Q:型材正反面放置異常
傳統生產使用“人工+彈夾”的方式進行鋁邊框型材上料,工作強度大,易出現型材正反面放置錯誤等異常情況,影響整體生產效率。
A:3D視覺有序抓取方案
為解決上述問題,海康機器人提供兩種解決方案。
方案1:中部抓取
如客戶提供型材長度方向的坐標信息,可選擇使用激光振鏡立體相機拍攝型材中間部位,RP處理后輸出一組型材抓取點引導機械臂進行抓取。
安裝方式 |
Eye-in-hand (臂載式安裝) |
架設高度 |
相機拍照點可覆蓋型材正中間,凈距離大于400mm |
實施條件 |
提供型材長度方向的坐標信息 |
視覺策略 |
使用相機拍攝型材中部,RP輸出一組型材抓取點引導機械臂進行抓取 |
抓取示意
成像效果
方案2:兩端抓取
如客戶不提供信息,若使用工業機器人,可使用一臺激光振鏡立體相機分別在型材兩端拍照;若應用在桁架系統上,可以使用兩臺激光振鏡立體相機,分別在型材的兩端進行拍攝。拍攝取圖后在算法內部進行點云融合定位,完成多根型材排列融合輸出一組型材的抓取點。
安裝方式 |
Eye-in-hand (臂載式安裝) |
架設高度 |
相機拍照點可覆蓋型材邊緣,凈距離大于400mm |
實施條件 |
未提供型材長度方向的坐標信息 |
視覺策略 |
相機在型材兩端拍照,算法內部點云融合定位,多根型材排列融合輸出一組抓取點 |
抓取示意
成像效果
方案優勢
采用激光振鏡立體相機,亞毫米級精度
支持根據型材料框規則程度,給出最優型材抓取策略
支持型材正反識別,支持非滿托型材拆垛
支持隔離紙定位去除
抓取效率高,視覺系統處理節拍≤2.5s/pcs
應用案例