1、行業(yè)需求特征
智能巡檢是復合移動機器人應用的主要市場之一,智能巡檢的范圍很廣,包括電力巡檢以及園區(qū)、數(shù)據(jù)中心以及礦山等行業(yè)的巡檢運維。其中,電力行業(yè)是目前應用機器人巡檢最多的領(lǐng)域。
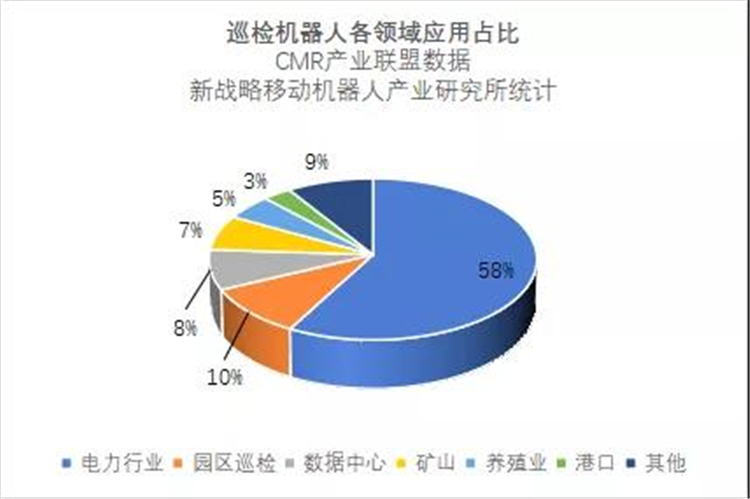
圖:巡檢機器人各領(lǐng)域應用占比
機器人在電力行業(yè)的應用主要集中在輸電、變電以及配電環(huán)節(jié),不同環(huán)節(jié)對于巡檢機器人的需求也有不同。
輸電環(huán)節(jié):對于高空輸電,目前主要用無人機對架空線路、塔架進行隱患排查;對于地下輸電,一般用隧道機器人對電力管廊內(nèi)的設(shè)備進行監(jiān)控。對于輸電線路損壞等問題,可以通過帶點作業(yè)機器人進行維修。
變電環(huán)節(jié):變電站是各級電網(wǎng)的核心樞紐。變電站巡檢機器人在室外環(huán)境下工作,需要具備自主移動、智能檢測、分析預警等功能。
配電環(huán)節(jié):配電站是電網(wǎng)的末端站點,數(shù)量眾多。配電站巡檢機器人在室內(nèi)環(huán)境下工作,在小型化、輕量化、環(huán)境交互系統(tǒng)等方面和變電站巡檢機器人存在差異。
在電力行業(yè)的三大環(huán)節(jié)中,機械臂+移動平臺式的復合型移動機器人主要應用在室內(nèi)的配電環(huán)節(jié),如電箱開柜檢測等,如優(yōu)艾智合以移動底盤+機械臂的復合移動機器人可在末端接入不同的配件以滿足巡檢中的其他需求,搭載了視覺識別功能的巡檢機器人可以在二維進行移動,末端配件實現(xiàn)開鎖功能,進行電柜狀態(tài)檢測。
2、市場需求預測
國家電網(wǎng)自2013年開始對變電站巡檢機器人首次招標,巡檢機器人市場開始進入全面推廣階段。2013-2015年間,國家電網(wǎng)對變電站智能巡檢機器人集采數(shù)量分別為100、280、430臺,到2016年已投入運行約1000臺,市場規(guī)模快速增長。2018-2020年國內(nèi)巡檢機器人市場總需求約為477億元,年均需求約159億:分別對應變電站巡檢機器人9000臺,市場空間72億;配電站巡檢機器人8.1萬臺,市場空間405億元。
電力行業(yè)需求呈穩(wěn)步增長趨勢,其他領(lǐng)域如數(shù)據(jù)中心、園區(qū)等近年來對機器人巡檢的認知度也在不斷提高,預計智能巡檢領(lǐng)域未來市場空間可達千億,復合型移動機器人在其中也將大有可為。
3、代表案例
案例一:優(yōu)艾智合工業(yè)設(shè)備巡檢機器人ARIS-IS火電廠應用
(1)項目描述:
工業(yè)設(shè)備巡檢機器人ARIS-IS在國內(nèi)某火電廠投入使用,實現(xiàn)區(qū)域設(shè)備無人值守巡檢,保障企業(yè)安全、綠色、高效的智能化生產(chǎn)環(huán)境。
火電廠人工巡檢受人員心理素質(zhì)、責任心、工作經(jīng)驗、技能技術(shù)水平影響較大,存在漏檢、誤勘的可能性,且現(xiàn)場巡視環(huán)境惡劣,區(qū)域內(nèi)高溫環(huán)境、設(shè)備位置復雜等因素導致人工勘查的難度大大提高,同時也給巡檢人員的安全帶來隱患。
機器人ARIS-IS主要集成設(shè)備識別、儀表檢測、空氣質(zhì)量檢測、振動檢測等功能,通過預先設(shè)定的巡檢任務(wù)代替人工完成設(shè)備狀態(tài)和環(huán)境狀態(tài)檢測,并通過數(shù)據(jù)分析對異常情況發(fā)出警告。采用激光SLAM+動態(tài)算法+慣性的組合導航控制方案,能根據(jù)場景的特征自動生成環(huán)境地圖,適應火電廠環(huán)境動態(tài)變化,智能檢測識別障礙物,主動停駛。

圖:工業(yè)設(shè)備巡檢機器人ARIS-IS應用場景
(2)難點及創(chuàng)新點:
項目難點在于精確識別火電廠內(nèi)設(shè)備儀表種類繁多,例如常規(guī)表、異形表、數(shù)顯表、刀閘等,需要對設(shè)備的運行狀態(tài)進行高效精準的診斷和反饋,并且有些設(shè)備還對機器人提出了操作要求,不同的設(shè)備需要對應不同的操作工具。火電廠現(xiàn)場環(huán)境復雜多變,面積大,需要機器人適應現(xiàn)場環(huán)境動態(tài)變化并進行精準導航,ARIS-IS在導航上利用SLAM技術(shù)+動態(tài)算法+慣性組合的方案,可以實現(xiàn)10萬+平米面積快速建圖以及精準定位。
(3)效益或影響:
實現(xiàn)無人值守區(qū)域覆蓋巡視,減少安全事故隱患。數(shù)據(jù)實時監(jiān)控分析,提前安全預警,降低安全事故發(fā)生概率。機器人7*24小時不間斷作業(yè),增加巡檢頻次,相對人工巡檢效率提高40%,確定巡檢標準后準確率高達99%,降低人工因素對巡檢結(jié)果的影響,減少誤判。智能數(shù)字化的識別系統(tǒng),便于信息化管理,提高管理效率,便于信息查詢。
案例二:新松國網(wǎng)數(shù)據(jù)中心巡檢復合移動機器人項目
(1)項目描述:
北京國網(wǎng)數(shù)據(jù)中心,在2018年采購了兩臺由新松公司生產(chǎn)的復合移動機器人用于數(shù)據(jù)中心的巡檢工作,復合移動機器人采用激光Slam導航技術(shù),最大運行速度1m/s。
復合移動機器人手臂上安裝有高清攝像機,溫度傳感器,拾音器及開門裝置,復合移動機器人自動運行到需要巡檢的機柜前,首先通過機器手臂上的開門裝置自動打開服務(wù)器機柜門,然后機器手臂自上而下,通過高清攝像機拍攝服務(wù)器運行指示燈的工作狀態(tài),通過溫度傳感器識別各服務(wù)器的工作溫度,通過拾音器識別各服務(wù)器工作的聲音。對出現(xiàn)的異常情況,復合移動機器人通過無線傳輸將故障信息傳送到監(jiān)控中心。
復合移動機器人可以不定期的對數(shù)據(jù)中心內(nèi)的設(shè)備及環(huán)境進行巡查,可以實現(xiàn)數(shù)據(jù)中心無人值守,確保數(shù)據(jù)中心運行穩(wěn)定。

圖:新松國網(wǎng)數(shù)據(jù)中心巡檢復合移動機器人
(2)難點及創(chuàng)新點:
這是首個應用于數(shù)據(jù)中心機房巡檢的復合移動機器人項目,復合移動機器人采用激光Slam導航技術(shù),沒有對數(shù)據(jù)中心機房環(huán)境進行破壞,移動機器人的柔性運行路線,便于數(shù)據(jù)機房的升級及調(diào)試。通過機器手臂對對服務(wù)器機柜門進行自動開關(guān)作業(yè),減少了數(shù)據(jù)中心改造的費用,機器手臂開門要求移動機器人重復定位精度高,同時在機器手臂上安裝高清攝像機和溫度傳感器,便于從多個角度進行識別工作,確保識別的準確性。創(chuàng)新性,機器手臂既充當了機器人手臂的工作也充當?shù)臋C器人移動的眼睛的工作。對于機房內(nèi)出現(xiàn)的故障不但能夠查看發(fā)現(xiàn)還能做簡單處理工作。
(3)效益或影響:
機房巡檢復合移動機器人不僅應用在電力行業(yè),還可應用于各行業(yè)的大數(shù)據(jù)中心,替代了數(shù)據(jù)機房的人員體力工作,增加了無人值守的安全性,移動復合移動機器人的應用會消除對于人員不能及時到達或人工疏忽造成的損失。提升這一領(lǐng)域的智能化程度。
案例三:節(jié)卡變電所巡檢機器人項目
(1)項目描述
節(jié)卡機器人與合作伙伴開展具備牽引變電所應急操作功能系統(tǒng)開發(fā)研究,基于JAKA Zu 3協(xié)作機器人、AGV、多傳感器、紅外測溫、圖像識別、物聯(lián)網(wǎng)等,實現(xiàn)無人巡檢及無人操作,解決應急狀態(tài)時無法操作、故障延時長的問題。
當發(fā)生應急響應時,通過AGV自主導航,運行至指定位置,JAKA Zu 3協(xié)作機器人斷開指定開關(guān),實現(xiàn)對成套設(shè)備(開關(guān)柜)、綜合自動化系統(tǒng)屏柜的面板按鈕、轉(zhuǎn)換開關(guān)的操作功能,操作功能可由牽引供電調(diào)度系統(tǒng)、綜合自動化系統(tǒng)或遠程集控中心進行指揮命令。

圖:節(jié)卡與合作伙伴打造的巡檢機器人
(2)難點及創(chuàng)新點
目前變電所人工巡檢存在著很多不足。傳統(tǒng)人工巡檢方式存在勞動強度大、工作效率低、檢測質(zhì)量分散、手段單一等不足,人工檢測的數(shù)據(jù)也無法準確、及時地接入管理信息系統(tǒng)。并且,隨著無人值守模式的推廣,巡視工作量越來越大,巡檢到位率、及時性無法保證。此外,在高原、缺氧、寒冷等地理條件或惡劣天氣條件下,人工巡檢還存在較大安全風險,缺乏有效的巡檢手段。大風、霧天、冰雪、冰雹、雷雨等惡劣天氣下,也無法及時進行巡檢。難以滿足現(xiàn)代化智能牽引變電所安全運行要求。
傳統(tǒng)巡檢操作方式均需人工操作。將智能應急操作裝置引入變電所,融合當前最新的機器人技術(shù)和人工智能技術(shù),創(chuàng)造性克服了以往鐵路牽引變電所人工巡檢的諸多弊端,滿足了鐵路行業(yè)用戶提出的新需求。
(3)效益或影響
JAKA Zu 3協(xié)作機器人,自重僅12kg,小巧輕便,與AGV匹配度高;重復定位精度為±0.02mm,在執(zhí)行命令時,可精準完成;防護較好,適用于工業(yè)環(huán)境。通過這種解決方案,有效降低了人工維護成本,相比部署傳統(tǒng)巡檢系統(tǒng)具有簡單靈活和成本低的優(yōu)勢,極大提升了變電所運維智能化水平和應急響應水平,為無人值守變電所的全面推廣提供了強有力的保障。對于進一步提升整個鐵路行業(yè)的智能化水平和高科技形象有著重要意義。
案例四:艾利特機器人軌道巡檢應用
(1)項目描述:
提到地鐵安防,人們通常都會想到進站安檢、監(jiān)控攝像,其實對于現(xiàn)代地鐵的安防設(shè)施建設(shè),單有監(jiān)控攝像,進站安檢,是遠遠不夠的。巡檢人員對地鐵進行實地檢查,仍然是無可替代的重要環(huán)節(jié)——每寸鐵軌、每枚螺絲都事關(guān)地鐵行車安全,巡檢只能用腳步丈量,沒有捷徑可走。雖然地鐵看上去就兩條軌道,很簡單,但是需要檢查的項目很多,是一個重人力的工種。位于華北的一家城市地鐵運營公司就面臨著這樣的問題。

圖:艾利特機器人應用于軌道巡檢
(2)難點及創(chuàng)新點:
目前地鐵大部分還是使用人工檢測,每條線路需要10到20名軌道檢修工每天凌晨進入隧道步行檢修,每小時只能檢測5公里軌道線路,存在作業(yè)效率低、人身安全隱患、無客觀標準、原始數(shù)據(jù)無詳實記錄、人工成本增加、夜間作業(yè)難免漏檢等諸多弊端。整套方案充電一次可連續(xù)運行8小時,基本能確保完成一條完整地鐵線路的檢測。該應用集成艾利特EC66(6kg負載)協(xié)作機器人,自重僅為17.5kg,相較于同負載傳統(tǒng)工業(yè)機器人,功率250w僅為傳統(tǒng)工業(yè)機器人的1/4不到,確保AGV小車運行時可達到更高的續(xù)航時間。此外,ELITE的協(xié)作機械臂提供48V直流版本,可與AGV集成后省略機器人控制柜由小車直接供電,系統(tǒng)更加緊湊。
(3)效益或影響:
目前客戶開始使用這套設(shè)備對軌道線路道床、扣件和鋼軌常見巡道這三大系統(tǒng)的十多項標準進行精準檢測,無論是扣件缺失、斷裂、浮起,鋼軌出現(xiàn)裂縫,道床出現(xiàn)積水、異物等,都能及時發(fā)現(xiàn)并報送。使用協(xié)作機器人+AGV方案替代人工檢車實現(xiàn)了軌道巡檢過程中的“安全、高效、精準”,將人員從繁重、惡劣的工作中解放出來,從而提升了整體運營效率。
復合移動機器人應用正在不斷深入,為了更好的解析當前我國復合移動機器人產(chǎn)業(yè)發(fā)展水平,中國移動機器人(AGV/AMR)產(chǎn)業(yè)聯(lián)盟此前曾發(fā)布了《復合移動機器人行業(yè)發(fā)展藍皮書(2021版)》;同時,為了進一步規(guī)范行業(yè)發(fā)展,由中國移動機器人(AGV/AMR)產(chǎn)業(yè)聯(lián)盟標準管理委員會主持制定的《工業(yè)應用移動機器人 復合機器人技術(shù)規(guī)范》團體標準也將在2022年3月正式發(fā)布,敬請期待!