移動(dòng)機(jī)器人為什么需要專用控制器
工業(yè)機(jī)器人具有工作效率高���、穩(wěn)定可靠、重復(fù)精度好�����、能在高危環(huán)境下作業(yè)等優(yōu)勢(shì)���,在傳統(tǒng)制造業(yè),特別是勞動(dòng)密集型產(chǎn)業(yè)的轉(zhuǎn)型升級(jí)中可發(fā)揮重要作用。目前���,國(guó)際工業(yè)機(jī)器人領(lǐng)域四大家族分別是ABB、KUKA��、FANUC和安川電機(jī)。一般來(lái)說��,工業(yè)機(jī)器人由3大部分6個(gè)子系統(tǒng)組成���。但縱觀工業(yè)機(jī)器人領(lǐng)域����,他們產(chǎn)品中均未見到有服務(wù)于其控制部分(系統(tǒng))的專用設(shè)備,然而在與機(jī)械臂相類似的移動(dòng)機(jī)器人賽道�,尤其是工業(yè)應(yīng)用移動(dòng)機(jī)器人中��,卻獨(dú)辟蹊徑�,發(fā)展出了單獨(dú)的專用控制器產(chǎn)品����。究其原因�,其一�,移動(dòng)機(jī)器人相比工業(yè)機(jī)械臂的各種要求都偏低,包括制造門檻、精度�、廠家的整合能力等����。進(jìn)入門檻低造成大量不同標(biāo)準(zhǔn)的移動(dòng)機(jī)器人涌入市場(chǎng)�����,使得移動(dòng)機(jī)器人的定位更接近于非標(biāo)設(shè)備��,在將非標(biāo)設(shè)備標(biāo)準(zhǔn)化的道路上�����,控制器就成為了核心零部件���。其二�����,移動(dòng)機(jī)器人控制器對(duì)下游集成商的能力要求和工業(yè)機(jī)械臂的對(duì)下游集成商的能力要求是一致的�����,如機(jī)械設(shè)計(jì)���、電氣設(shè)計(jì)以及方案整合的能力�,集成商可以在機(jī)械臂上增加不同的末端夾具形成自動(dòng)化工站(如焊接���、打磨�����、噴涂等)���,也可以通過移動(dòng)機(jī)器人控制器設(shè)計(jì)底盤并搭載不同的上層機(jī)構(gòu)(如頂升����、輥筒、料箱等)�,兩者的邏輯一致�,對(duì)集成商能力要求也一致,因此移動(dòng)機(jī)器人控制器的客戶并不是移動(dòng)機(jī)器人本體廠家���,而是大量的工業(yè)自動(dòng)化的集成商。其三���,終端工廠的場(chǎng)景具有分散且非標(biāo)的特性��,行業(yè)不同�����、終端客戶需求不同��、終端工廠環(huán)境不同等都佐證了場(chǎng)景的復(fù)雜�,移動(dòng)機(jī)器人在不同的場(chǎng)景下需要由集成商進(jìn)行場(chǎng)景化的應(yīng)用,而直接購(gòu)買控制器造車成為了集成商快速打造自主品牌的最短路徑���。基于以上三點(diǎn)不難發(fā)現(xiàn),移動(dòng)機(jī)器人控制器和機(jī)械臂本體的發(fā)展模式和使用邏輯更為一致��,即:移動(dòng)機(jī)器人:控制器→集成商→造車實(shí)施(加裝載具)機(jī) 械 臂:本 體→集成商→集成實(shí)施(加裝夾具)因此,在移動(dòng)機(jī)器人領(lǐng)域中衍生出控制器的分層則成為了必然�����,同時(shí)控制器廠家也為廣大的集成商提供了更多差異化的選擇和價(jià)值����。目前大多數(shù)移動(dòng)機(jī)器人本體廠家更傾向于做標(biāo)準(zhǔn)化而量大的產(chǎn)品���,而控制器的出現(xiàn)�����,使得在非標(biāo)產(chǎn)品中出現(xiàn)了部分“標(biāo)準(zhǔn)件”�,可以讓集成商在標(biāo)準(zhǔn)化產(chǎn)品的基礎(chǔ)上再去做創(chuàng)新�;此外�����,移動(dòng)機(jī)器人控制器極大降低了集成商的學(xué)習(xí)及實(shí)施成本���,學(xué)會(huì)了一套控制器����,則可以制造頂升�、輥筒、叉式�����、料箱等多種形態(tài)的機(jī)器人,這也是多機(jī)器人的統(tǒng)一控制及調(diào)度的基礎(chǔ)����。
移動(dòng)機(jī)器人(AGV/AMR)控制器發(fā)展歷程
1972年�,科爾摩根AGV發(fā)布了第一代ACC系列車輛控制器��,標(biāo)志著控制器行業(yè)正式開啟篇章����。在此階段,行業(yè)更多以單片機(jī)、PLC技術(shù)形式來(lái)解決控制器問題�����,AGV/AMR專用控制器概念相對(duì)較弱,多以控制元器件組合為主�。同時(shí)存在算法能力弱、價(jià)格貴�、功能少����、開發(fā)成本高��、穩(wěn)定性低、體積大等缺點(diǎn),距離標(biāo)準(zhǔn)品商業(yè)化還有不小距離����。伴隨行業(yè)需求的發(fā)展��,逐漸開始走向?qū)S每刂破麟A段���。2012年,亞馬遜收購(gòu)KIVA��,二維碼導(dǎo)航的機(jī)器人開始規(guī)?����;瘧?yīng)用于電商場(chǎng)景���,標(biāo)志性著控制器開始走向?qū)C(jī)時(shí)代�����。此時(shí)行業(yè)開始更多出現(xiàn)控制器專機(jī),在感知�、決策�����、執(zhí)行層面已經(jīng)具備較為完整的處理算法�����,實(shí)際項(xiàng)目和應(yīng)用場(chǎng)景的經(jīng)驗(yàn)也反哺了控制器在感知��、決策����、執(zhí)行層面的可信度���、效率與易用性的提升�����。受限于感知層的導(dǎo)航定位方式以二維碼����,磁力�����,反光板等為主���,行駛路徑相對(duì)固定�����,所以在決策執(zhí)行算法層面需求相對(duì)較弱。同時(shí)此階段控制器基本以廠商自用為主,較少以專機(jī)標(biāo)準(zhǔn)品形式出現(xiàn)在市場(chǎng)����。從行業(yè)角度還不具備廣泛易用性��,無(wú)法滿足日益增長(zhǎng)的行業(yè)客戶的各類造車需求�����。2016年左右,以仙工智能�����、科聰、科鈦、賓通等為代表的企業(yè)�����,開啟以SLAM導(dǎo)航為主的標(biāo)準(zhǔn)品控制器。正式邁入AMR專用控制器時(shí)代,相較于此前,該階段的控制器具有高集成性,多功能�����,高性能,易用性強(qiáng)的特點(diǎn)。以SLAM為核心的導(dǎo)航方式融合視覺等感知技術(shù)�����,使得路徑更靈活、功能更柔性����。這對(duì)感知、決策�����、執(zhí)行算法在功能實(shí)現(xiàn)上有了更高要求。伴隨著移動(dòng)機(jī)器人應(yīng)用深度及廣度的不斷拓展,為了更好地滿足本體企業(yè)業(yè)務(wù)的需要�,一些控制器廠商也在不斷的迭代革新產(chǎn)品,如2021年仙工智能推出的全球首款功能安全認(rèn)證控制器,進(jìn)一步滿足了AGV/AMR企業(yè)在國(guó)際化進(jìn)程中對(duì)于功能安全的需求。
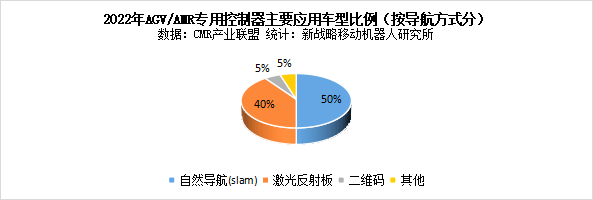
表:2022年AGV/AMR專用控制器主要應(yīng)用車型比例(按導(dǎo)航方式分)
移動(dòng)機(jī)器人控制器市場(chǎng)競(jìng)爭(zhēng)格局
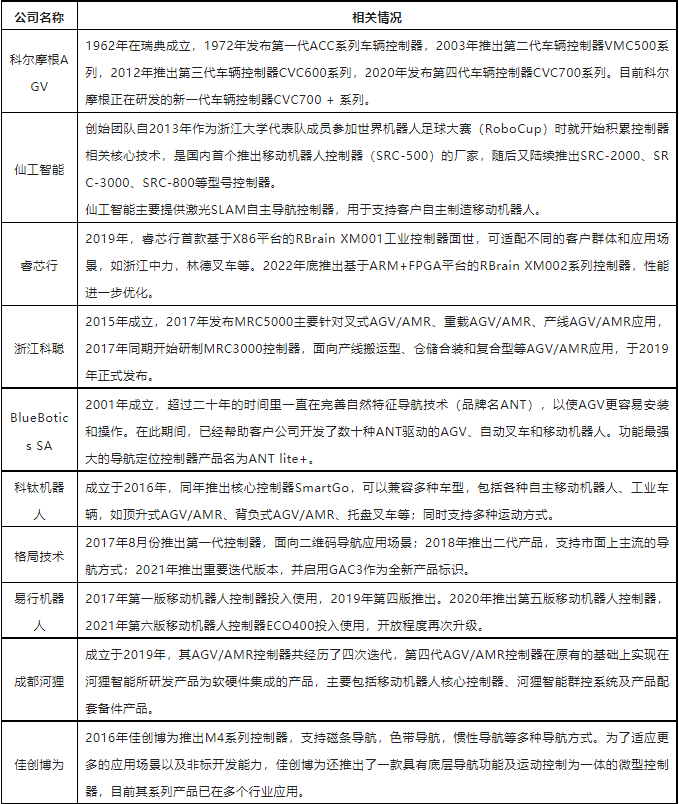
目前業(yè)內(nèi)有部分AGV/AMR企業(yè)會(huì)選擇自己開發(fā)控制器,如新松��、昆船�、優(yōu)艾智合��、斯坦德����、國(guó)自機(jī)器人、坤厚等企業(yè)都在研發(fā)自己的控制模塊��。專業(yè)做AGV/AMR控制器及相關(guān)系統(tǒng)的廠商中,科爾摩根AGV最早將這一技術(shù)帶入中國(guó)市場(chǎng)��,先后與國(guó)內(nèi)眾多AGV/AMR企業(yè)達(dá)成了合作��,提供導(dǎo)航控制一體化解決方案���。伴隨著中國(guó)AGV/AMR行業(yè)的不斷發(fā)展��,2015年之后�����,國(guó)內(nèi)也有一些創(chuàng)業(yè)公司瞄準(zhǔn)這一塊市場(chǎng)開始開發(fā)相關(guān)產(chǎn)品��,并陸續(xù)投入使用,仙工智能成為全國(guó)首個(gè)自主研發(fā)激光SLAM自主導(dǎo)航控制器的廠商�。
圖:中國(guó)市場(chǎng)主要AGV/AMR控制器廠商(排名不分先后)
隨著工業(yè)應(yīng)用移動(dòng)機(jī)器人(AGV/AMR)智能化��、柔性化與多樣化的發(fā)展趨勢(shì),導(dǎo)航方式會(huì)愈加靈活�����,對(duì)算法算力要求會(huì)越來(lái)越高�����,因此�,行業(yè)未來(lái)對(duì)于專用控制器的需求將會(huì)進(jìn)一步加快�!
為了更好地解讀移動(dòng)機(jī)器人專用控制器市場(chǎng)發(fā)展現(xiàn)狀及趨勢(shì),2022年年底,由CMR產(chǎn)業(yè)聯(lián)盟 �����、新戰(zhàn)略移動(dòng)機(jī)器人產(chǎn)業(yè)研究所主編,上海仙工智能科技有限公司冠名發(fā)布��,科爾摩根自動(dòng)化AB、成都睿芯行科技有限公司、英特爾聯(lián)合參編的《工業(yè)應(yīng)用移動(dòng)機(jī)器人(AGV/AMR)專用控制器產(chǎn)品發(fā)展藍(lán)皮書(2022版)》正式發(fā)布!該藍(lán)皮書對(duì)工業(yè)應(yīng)用移動(dòng)機(jī)器人(AGV/AMR)專用控制器產(chǎn)品進(jìn)行了深度調(diào)研�,介紹移動(dòng)機(jī)器人控制器的起源����、關(guān)鍵技術(shù)及發(fā)展趨勢(shì)以及最新的應(yīng)用場(chǎng)景等,為移動(dòng)機(jī)器人控制器研究提供有借鑒價(jià)值的參考���。
藍(lán)皮書電子版完整內(nèi)容可添加聯(lián)盟秘書處工作人員微信免費(fèi)獲取�!