隨著工業(yè)自動(dòng)化的發(fā)展,AGV(自動(dòng)引導(dǎo)車)已成為物流自動(dòng)化領(lǐng)域中的關(guān)鍵工具。較大規(guī)模的工廠、倉庫和物流中心紛紛引入AGV,以實(shí)現(xiàn)物流流程的自動(dòng)化和智能化,從而提高物流效率、準(zhǔn)確性和安全性,同時(shí)減少人工操作的錯(cuò)誤和勞動(dòng)強(qiáng)度,為整體生產(chǎn)和物流管理水平的提升做出貢獻(xiàn)。
在這一自動(dòng)化系統(tǒng)中,機(jī)器視覺發(fā)揮著重要角色。首先,它能進(jìn)行障礙物檢測(cè)與避障,通過實(shí)時(shí)的圖像處理和目標(biāo)識(shí)別算法,AGV能夠識(shí)別并確定周圍環(huán)境中的障礙物,采取相應(yīng)的避障動(dòng)作,確保安全通行。其次,機(jī)器視覺在AGV的導(dǎo)航與定位中起到關(guān)鍵作用。AGV配備攝像頭或激光雷達(dá)等傳感器,通過識(shí)別地標(biāo)或標(biāo)記物,確定自身的位置和方向,從而提供準(zhǔn)確的導(dǎo)航信息,幫助AGV規(guī)劃路徑并精確到達(dá)目標(biāo)位置。此外,機(jī)器視覺還用于識(shí)別和處理貨物。AGV搭載視覺系統(tǒng),能夠識(shí)別貨物或條碼(二維碼),確定貨物的類型、數(shù)量和目的地,實(shí)現(xiàn)自動(dòng)化的負(fù)載識(shí)別與處理。
近些年迅猛發(fā)展的3D視覺技術(shù)已成為AGV領(lǐng)域的關(guān)鍵技術(shù)之一,進(jìn)一步提升AGV智能化水平的同時(shí),也實(shí)現(xiàn)了更高效、準(zhǔn)確和安全的物流操作。在戶外環(huán)境中,用于AGV托盤或貨物識(shí)別最常見的兩種3D視覺技術(shù)分別是主動(dòng)雙目視覺技術(shù)和ToF(Time-of-Flight)感知技術(shù),兩種3D視覺技術(shù)均可用于物體深度信息的快速捕捉,但在性能表現(xiàn)中,依然存在一些差別,本文選擇了全球知名的主動(dòng)雙目相機(jī)標(biāo)桿產(chǎn)品與維感科技Vzense® DS系列的相機(jī)在戶外強(qiáng)光2米距離范圍內(nèi),進(jìn)行了成像效果對(duì)比測(cè)試,供大家參考與選型。
雙目視覺技術(shù) 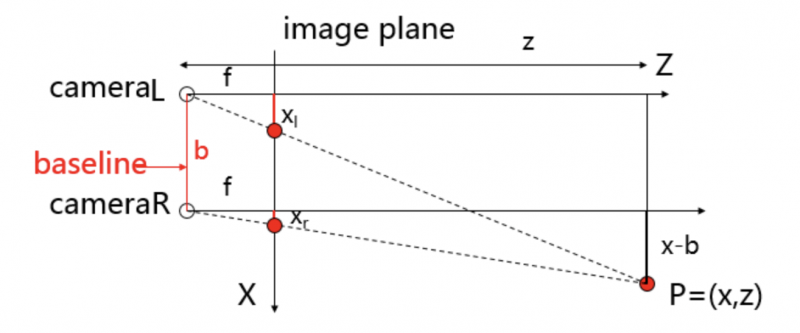
雙目視覺技術(shù)由兩個(gè)相機(jī)組成,分別模擬人類的雙眼,通過三角測(cè)距法計(jì)算物體到相機(jī)的距離。這兩個(gè)相機(jī)被安裝在一定的距離上,以獲得不同的視角,通過同時(shí)捕捉同一場(chǎng)景的左右兩個(gè)圖像,并分析這些圖像之間的視差(兩個(gè)圖像中對(duì)應(yīng)點(diǎn)之間的位移),可以計(jì)算出場(chǎng)景中物體的深度信息。為提高數(shù)據(jù)準(zhǔn)確性,往往在雙目視覺技術(shù)基礎(chǔ)上搭配主動(dòng)投射特殊圖形的光源,如紅外光或結(jié)構(gòu)光。通過分析左右兩個(gè)圖像之間的視差和光場(chǎng)的變化,計(jì)算出物體的深度信息,全球知名代表產(chǎn)品有Intel® RealSenseTM D400系列與ZED Stereo相機(jī)。 
Intel® RealSenseTM D435(Intel官網(wǎng)圖片) ToF(Time-of-Flight)相機(jī)技術(shù) 
ToF(Time-of-Flight)技術(shù)的原理是由ToF模組的光源向被測(cè)對(duì)象發(fā)出光子,在抵達(dá)被測(cè)對(duì)象并通過圖像傳感器接收反射回到ToF模組的光子,計(jì)量此段“光的飛行時(shí)間”,在光速已知的前提下,即可得到距離數(shù)據(jù)。ToF相機(jī)技術(shù)是以光學(xué)系統(tǒng)為接受路徑的面陣一次性成像,非掃描式3D成像深度信息捕捉技術(shù),全球知名代表產(chǎn)品有微軟Azure Kinect,Lucid Helios與Basler Blaze。維感科技作為國內(nèi)迅速發(fā)展起來的工業(yè)級(jí)ToF相機(jī)技術(shù)研發(fā)與生產(chǎn)企業(yè),亦推出了基于Sony ToF芯片,極具性價(jià)比的Vzense® DS系列。
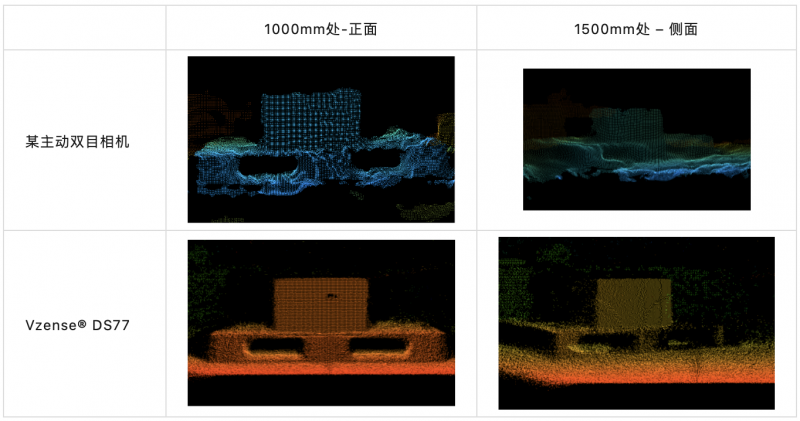
戶外場(chǎng)景與低反射率物體的識(shí)別,一直都是AGV目標(biāo)物識(shí)別的難點(diǎn),強(qiáng)烈的光照會(huì)使圖像采集時(shí)光強(qiáng)度驟升,物體局部過曝,或產(chǎn)生較大明暗差,導(dǎo)致圖像質(zhì)量下降,丟失物體細(xì)節(jié),進(jìn)而影響距離值的計(jì)算與識(shí)別的準(zhǔn)確性。而黑色物體(如包裹,托盤,貨架)會(huì)因其超低反射率的原因,導(dǎo)致相機(jī)難以捕捉到較高質(zhì)量的距離數(shù)據(jù)。 針對(duì)這個(gè)常見的AGV識(shí)別痛點(diǎn),進(jìn)行了下述性能對(duì)比測(cè)試: 測(cè)試條件:戶外,正午,太陽光直射,光照強(qiáng)度約60,000Lux 被測(cè)物體:1m*1.2m的黑色與藍(lán)色托盤 相機(jī)機(jī)型:某主動(dòng)雙目相機(jī)與維感科技Vzense® DS系列 
測(cè)試場(chǎng)景實(shí)拍圖 對(duì)比測(cè)試一: 分別拍攝1米與1.5米距離處,相機(jī)正對(duì)與側(cè)對(duì)黑色托盤時(shí)的點(diǎn)云數(shù)據(jù)對(duì)比
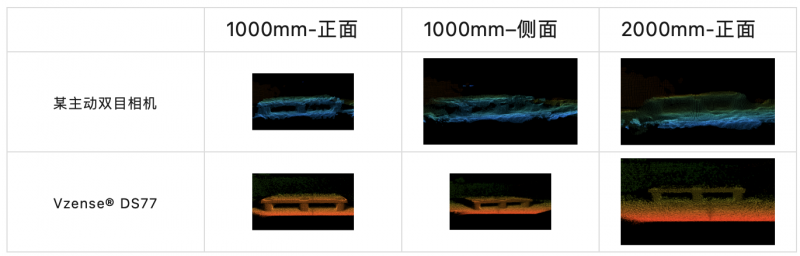
對(duì)比測(cè)試二: 分別拍攝1米與2米距離處,相機(jī)正對(duì)與側(cè)對(duì)藍(lán)色托盤時(shí)的點(diǎn)云數(shù)據(jù)對(duì)比
對(duì)比測(cè)試三: 分別拍攝1米距離處的黑色托盤與藍(lán)色托盤,相機(jī)正對(duì)托盤時(shí)的點(diǎn)云數(shù)據(jù)放大后的平整度情況對(duì)比
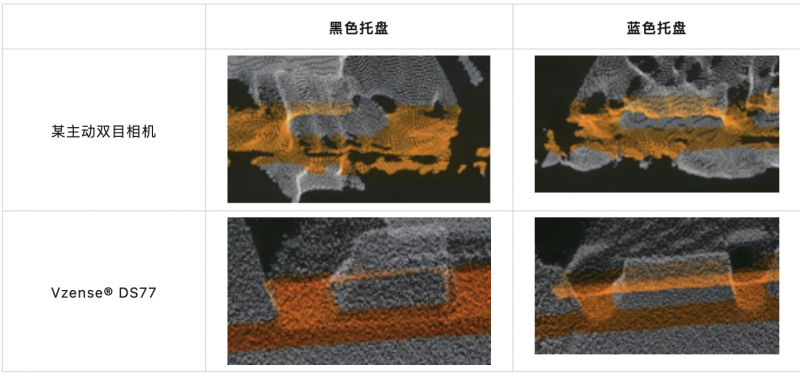
綜合上述多組測(cè)試對(duì)比數(shù)據(jù)容易看出,在戶外1~2米測(cè)量距離處,維感科技Vzense® DS77 ToF相機(jī)產(chǎn)品擁有更好的抗光性,數(shù)據(jù)穩(wěn)定性與平整度,更加適合AGV在戶外場(chǎng)景中進(jìn)行托盤與貨物識(shí)別。這不僅得益于Vzense® DS系列搭載了性能卓越的Sony ToF芯片,將高精度檢測(cè)反射光相位的像素技術(shù)CAPD與背照式CMOS圖像傳感器高速像素技術(shù)結(jié)合,更得益于維感科技團(tuán)隊(duì)多年來專注于ToF感知技術(shù),將多頻模式與高動(dòng)態(tài)范圍(HDR)技術(shù)融入到產(chǎn)品設(shè)計(jì)中,通過捕捉多個(gè)不同頻率與多個(gè)不同曝光時(shí)間的方式獲得圖像,使得復(fù)雜場(chǎng)景中的深度數(shù)據(jù)也可以精確到毫米級(jí)別。
應(yīng)用案例一:AGV叉車托盤識(shí)別與避障 Vzense® ToF相機(jī)已成功集成在多品牌AGV產(chǎn)品中,AGV叉車?yán)肨oF相機(jī)提供的深度信息,識(shí)別不同明暗環(huán)境中的托盤、貨物、障礙物等,AGV可以安全準(zhǔn)確地識(shí)別物品、拾取并運(yùn)輸?shù)侥康牡亍?br />

應(yīng)用案例二:農(nóng)業(yè)AMR自主移動(dòng)機(jī)器人 Vzense® RGB-D ToF相機(jī)安裝于農(nóng)業(yè)AMR,用于識(shí)別水果或農(nóng)作物的大小與顏色,從而判斷其成熟度,助力智慧農(nóng)業(yè)。Vzense® ToF相機(jī)在海外多個(gè)農(nóng)業(yè)AMR產(chǎn)品上,均有批量出貨且在戶外強(qiáng)光/黑暗中應(yīng)用的案例。

應(yīng)用案例三:混凝土車泵協(xié)同 Vzense® ToF相機(jī)可獲取堆積物的點(diǎn)云數(shù)據(jù),從而計(jì)算倉庫物料、農(nóng)作物、砂石、飼料等堆積物的庫存或使用情況。如下圖所示,國內(nèi)某知名集團(tuán)的混凝土車泵協(xié)同系統(tǒng),將Vzense® ToF相機(jī)應(yīng)用在出料篩網(wǎng)過程中檢測(cè)水泥漿的高度,從而自動(dòng)控制水泥漿出料的速度,真正實(shí)現(xiàn)無人操控。 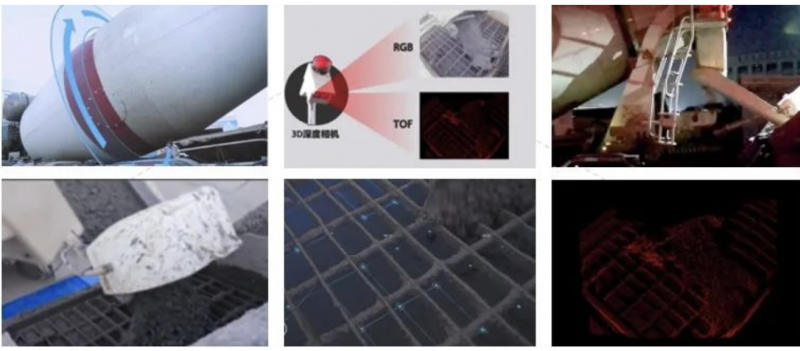
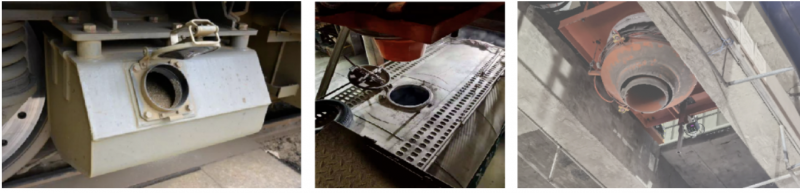
應(yīng)用案例四:箱口/砂口/油罐口等位置識(shí)別 將Vzense® ToF相機(jī)安裝在頂端,識(shí)別箱口、砂口、油罐口的準(zhǔn)備坐標(biāo)信息后,導(dǎo)引設(shè)備移動(dòng)到目標(biāo)位置,使得裝載過程更為精準(zhǔn)與高效,實(shí)現(xiàn)自動(dòng)化裝卸。
DS86&DS87

在這一自動(dòng)化系統(tǒng)中,機(jī)器視覺發(fā)揮著重要角色。首先,它能進(jìn)行障礙物檢測(cè)與避障,通過實(shí)時(shí)的圖像處理和目標(biāo)識(shí)別算法,AGV能夠識(shí)別并確定周圍環(huán)境中的障礙物,采取相應(yīng)的避障動(dòng)作,確保安全通行。其次,機(jī)器視覺在AGV的導(dǎo)航與定位中起到關(guān)鍵作用。AGV配備攝像頭或激光雷達(dá)等傳感器,通過識(shí)別地標(biāo)或標(biāo)記物,確定自身的位置和方向,從而提供準(zhǔn)確的導(dǎo)航信息,幫助AGV規(guī)劃路徑并精確到達(dá)目標(biāo)位置。此外,機(jī)器視覺還用于識(shí)別和處理貨物。AGV搭載視覺系統(tǒng),能夠識(shí)別貨物或條碼(二維碼),確定貨物的類型、數(shù)量和目的地,實(shí)現(xiàn)自動(dòng)化的負(fù)載識(shí)別與處理。
01
技術(shù)原理與代表產(chǎn)品
02
戶外測(cè)試數(shù)據(jù)對(duì)比
03
VZENSE® DS系列戶外成功案例分享
04
維感科技Vzense® DS系列新品介紹
工業(yè)級(jí)RGB-D TOF深度相機(jī)DS系列
輕量化設(shè)計(jì),結(jié)構(gòu)緊湊,尺寸更小,重量更輕 側(cè)出口設(shè)計(jì)使安裝和使用更加便捷 IP42/IP67防水防塵等級(jí)可選,滿足復(fù)雜環(huán)境需求 優(yōu)化RGB解像力,更清晰的彩色圖像顯示 RGB圖像與深度圖像微秒級(jí)同步,實(shí)時(shí)捕獲物體三維數(shù)據(jù) 支持 DepthHDR模式以獲取高對(duì)比度和復(fù)雜場(chǎng)景中的數(shù)據(jù) 受環(huán)境光照影響小,可在強(qiáng)光和黑暗中無障礙識(shí)別 軟/硬觸發(fā)模式,支持多相機(jī)同時(shí)工作